
”开源飞控“ 的搜索结果
作为一个开源项目,在用户社区的快速反馈的基础上不断发展。相应的开发团队与社区和商业合作伙伴合作,为ArduPilot添加惠及所有人的功能。尽管ArduPilot不生产任何硬件,但ArduPilot固件可在各种不同的硬件上工作;...
stm32开源飞控源代码.rar
标签: 飞控
stm32开源飞控.rar 1.stm32飞控 2.mpu6050姿态算法 3.蓝牙遥控 4.2401遥控 5.PID调节
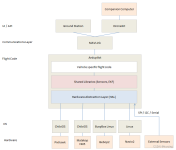
BetaFlight是穿越机领域比较成熟的开源飞控,本篇文章主要分析一下源代码以及如何使用这个开源代码
无人设计之 开源飞控的使用
标签: 无人机
无人机的控制所需有硬件相关和飞控软件,开源飞控软件可选用px4,而硬件可根据需求选用pixhawk相关飞控,而开源飞控的便捷在于源码公开,只需将源码编译成固件,烧录到飞控器,而后经过飞控调参,可完成无人机的...
ArduPilot开源飞控有各种飞行模式,比如:stablize/acro/auto/guided 等等。基于这些飞行模式,用户可以根据需要选择合适的飞行计划。 - 花飞、竞速:可以直接采用acro手动模式 - 任务、航点:可以选择auto飞行模式...
基于STM32F405的开源飞控代码,包括系统的硬件电路原理图,详细的说明了嵌入式软件开发的流程,以及传感器MPU6050,MS5611,5833L以及AT45Flash常用控制律的存储,设备驱动以及航姿滤波算法设计、控制律实现等内容。
总结开源飞控pixhawk的各种代码解读,总体框架结构的运行思路,各模块详细设计步骤
几大主流开源飞控平台优劣比较
标签: 开源飞控平台
几大主流开源飞控平台优劣比较,有APM px4/pixhawk autopilot PPZ MWC等飞控详细分析。
著名的国外开源飞控paparazzi飞控源码在keil平台上编译仿真调试的源码工程,方便喜欢折腾开源飞控的伙伴们进行二次开发实践
开源飞控之王--PIXHAWK教程V0.4.10.pdf
Runs on the most popular F4 and F7 flight controllers ,Multiple sensor support,Advanced gyro filtering: Matrix Filter and RPM filter
以上内容属于笔者的学习笔记,是经过网络搜集资料后的个人总结,仅供参考。
无人机能被快速普及,很大程度上是得益于开源飞控的发展,因为困扰着无人机发展的关键设备是自动驾驶仪。那么,开源飞控是什么?又是如何发展过来的? 在纷繁复杂的无人机产品中,四旋翼飞行器以其结构简单、使用...
Mission Planner开源地面站,适用于APM、PIX、Pixhawk 、TURBO PiX等开源飞控,这是解锁无人机的必须软件。适用于window系统。Mission Planner开源地面站,适用于APM、PIX、Pixhawk 、TURBO PiX等开源飞控,这是解锁...

飞控硬件厂商在设计飞控的时候,在开发、测试阶段已经将IMU方向配置在硬件定义文件中了。目前,相对来说,国内比较主流的飞控代码可以分为两大类:两者坐标系有差别,尤其在硬件配置文件中定义的角度,更是出现非常...
之前在[ArduPilot飞控之FAILSAFE机制](https://blog.csdn.net/lida2003/article/details/132191018)中,针对Ardupilot的`FAILSAFE`机制进行了相对完整的介绍。 本章节将从代码的角度来看`FAILSAFE`代码触发入口,...
开源飞控:支持气压计、超声波定高、户外GPS定点、定速巡航,部分视频链接如下: 无名飞控暴力测试 无名飞控江边定点(长时间) 无名飞控定高作死测试 无名飞控加速度计6面校准与融合简单讲解 无名飞控源码整体框架...
因此,AP_Mission类的理解对于飞控自主导航任务是重中之重,为此,研读下这部分代码逻辑。负责管理任务命令列表:“nav”, “do” , “conditional”注:代码注释似乎有拼写错误,这里给纠正下。负责提供当前/之前/...
开源飞控初探(三)两大开源飞控的历史
标签: 开源
Pixhawk是硬件,PX4是它的原生固件。这个团队维护的地面站项目是QGroundControl...日常沟通的【飞控】一词有多个含义:最专业的意思:无人机上的MCU作为板载计算机,连同所有传感器和控制飞行的电机,整体被称为飞控。
几大主流开源飞控平台优劣比较各大主流开源平台对比首先明确我们的需求:1)平台硬件,固件都比较成熟,开发环境易上手。2)性能上强调平台抗风性,飞行稳定性。3)由于植保机工作环境恶劣,硬件要求有宽广的工作温度...
在2010年6月8日,苹果发布了iphone4,从此掀起了智能手机变革的热潮,发布会上乔布斯为我们带来了一项重大的应用—-陀螺仪,该装置可以让iphone4感知人体移动的方向,结合重力感应、加速度感应装置可以让iphone4提供...
AHRS(Attitude Heading Reference System): 飞控最为重要的一个任务就是姿态、位置、方向计算。接下去又是front-end / back-end分层设计,本章节不再展开。但是最终汇聚到数据算法处理的是。本章节,将从代码层面...
原文 ...aid=202 李大伟 北京航空航天大学无人驾驶飞行器设计研究所 副教授 杨炯 北京航空航天大学 无人驾驶飞行器设计研究所 工程师 在纷繁复杂的无人机产品中,四旋翼飞行器以其结构...
电子-无名科创开源飞控使用说明书V2.0.6.pdf,综合电子技术四轴飞行器|飞控
本人在5年前,在知乎下写过一篇回答,如何用开源飞控PIXHAWK进行二次开发? https://www.zhihu.com/question/38874663/answer/84239995 现如今,开源飞控也已经发展的相对成熟很多,所以今天重新整理一下这个问题...
开源飞控发展 一 开源飞控发展 第一代开源飞控系统使用Arduino或其他类似开源电子平台为基础,扩展连接各种MEMS传感器,能够让无人机能平稳地飞起来。 第二代开源飞控系统大多拥有自己的开源硬件、开发环境和社区,...

推荐文章
- 【vue-treeselect+vxe-table】数据量大的时候懒加载,数据回显,输入框绑值,末级节点不要前面的箭头等问题详解_treeselect显示加载中-程序员宅基地
- 【从0入门JVM】-01Java代码怎么运行的_代码如何在jvm中运行-程序员宅基地
- TreeViewer应用实例(ITreeContentProvider与LabelProvider的使用)-程序员宅基地
- 如何将别人Google云端硬盘中的数据进行保存_谷歌网盘怎么保存别人的资源-程序员宅基地
- java中查看数据类型_java查看数据类型-程序员宅基地
- Scrapy-redis分布式+Scrapy-redis实战-程序员宅基地
- web播放H.264/H.265,海康,大华监控摄像头RTSP流方案_海康api hls怎么取265的流-程序员宅基地
- HTML详解连载(7)-程序员宅基地
- PHP使用多线程-程序员宅基地
- 由excel一键生成json的小工具(基于python,仅支持单层嵌套)_excel转json github-程序员宅基地