APM/PX4/betaflight/inav开源飞控之IMU方向_betaflight px4-程序员宅基地
技术标签: Ardupilot ArduPilot betaflight xFlight 开源 PX4
1. 源由
飞控硬件厂商在设计飞控的时候,在开发、测试阶段已经将IMU方向配置在硬件定义文件中了。
目前,相对来说,国内比较主流的飞控代码可以分为两大类:
- 航模:betaflight/inav
- 无人机:APM/PX4
两者坐标系有差别,尤其在硬件配置文件中定义的角度,更是出现非常离奇的情况。这里做一个整体应用级别的分析,希望能够帮助后续定位底层差异。
2. 坐标系
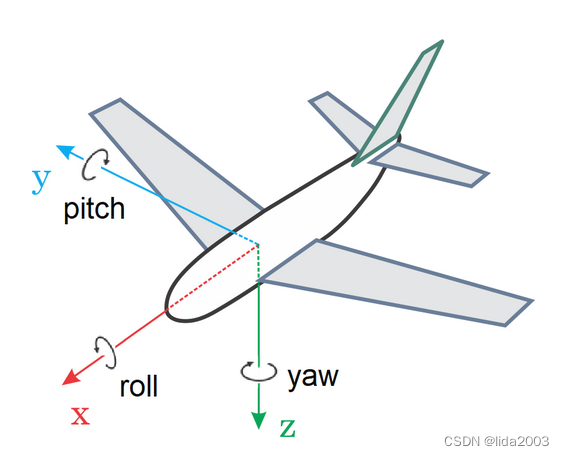
2.1 APM/PX4:机体坐标 + 右手系规则
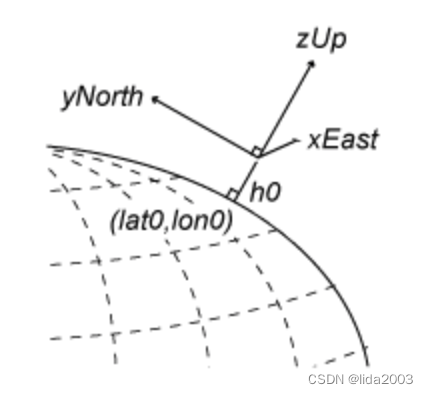
2.2 betaflight/inav:xEast-yNorth-zUp + yaw反向 + 右手系规则
3. 转向定义
3.1 APM/PX4
enum Rotation : uint8_t {
ROTATION_NONE = 0,
ROTATION_YAW_45 = 1,
ROTATION_YAW_90 = 2,
ROTATION_YAW_135 = 3,
ROTATION_YAW_180 = 4,
ROTATION_YAW_225 = 5,
ROTATION_YAW_270 = 6,
ROTATION_YAW_315 = 7,
ROTATION_ROLL_180 = 8,
ROTATION_ROLL_180_YAW_45 = 9,
ROTATION_ROLL_180_YAW_90 = 10,
ROTATION_ROLL_180_YAW_135 = 11,
ROTATION_PITCH_180 = 12,
ROTATION_ROLL_180_YAW_225 = 13,
ROTATION_ROLL_180_YAW_270 = 14,
ROTATION_ROLL_180_YAW_315 = 15,
ROTATION_ROLL_90 = 16,
ROTATION_ROLL_90_YAW_45 = 17,
ROTATION_ROLL_90_YAW_90 = 18,
ROTATION_ROLL_90_YAW_135 = 19,
ROTATION_ROLL_270 = 20,
ROTATION_ROLL_270_YAW_45 = 21,
ROTATION_ROLL_270_YAW_90 = 22,
ROTATION_ROLL_270_YAW_135 = 23,
ROTATION_PITCH_90 = 24,
ROTATION_PITCH_270 = 25,
ROTATION_PITCH_180_YAW_90 = 26, // same as ROTATION_ROLL_180_YAW_270
ROTATION_PITCH_180_YAW_270 = 27, // same as ROTATION_ROLL_180_YAW_90
ROTATION_ROLL_90_PITCH_90 = 28,
ROTATION_ROLL_180_PITCH_90 = 29,
ROTATION_ROLL_270_PITCH_90 = 30,
ROTATION_ROLL_90_PITCH_180 = 31,
ROTATION_ROLL_270_PITCH_180 = 32,
ROTATION_ROLL_90_PITCH_270 = 33,
ROTATION_ROLL_180_PITCH_270 = 34,
ROTATION_ROLL_270_PITCH_270 = 35,
ROTATION_ROLL_90_PITCH_180_YAW_90 = 36,
ROTATION_ROLL_90_YAW_270 = 37,
ROTATION_ROLL_90_PITCH_68_YAW_293 = 38, // this is actually, roll 90, pitch 68.8, yaw 293.3
ROTATION_PITCH_315 = 39,
ROTATION_ROLL_90_PITCH_315 = 40,
ROTATION_PITCH_7 = 41,
ROTATION_ROLL_45 = 42,
ROTATION_ROLL_315 = 43,
///
// Do not add more rotations without checking that there is not a conflict
// with the MAVLink spec. MAV_SENSOR_ORIENTATION is expected to match our
// list of rotations here. If a new rotation is added it needs to be added
// to the MAVLink messages as well.
///
ROTATION_MAX,
ROTATION_CUSTOM_OLD = 100,
ROTATION_CUSTOM_1 = 101,
ROTATION_CUSTOM_2 = 102,
ROTATION_CUSTOM_END,
};
3.2 betaflight/inav
typedef enum {
ALIGN_DEFAULT = 0, // driver-provided alignment
// the order of these 8 values also correlate to corresponding code in ALIGNMENT_TO_BITMASK.
// R, P, Y
CW0_DEG = 1, // 00,00,00
CW90_DEG = 2, // 00,00,01
CW180_DEG = 3, // 00,00,10
CW270_DEG = 4, // 00,00,11
CW0_DEG_FLIP = 5, // 00,10,00 // _FLIP = 2x90 degree PITCH rotations
CW90_DEG_FLIP = 6, // 00,10,01
CW180_DEG_FLIP = 7, // 00,10,10
CW270_DEG_FLIP = 8, // 00,10,11
ALIGN_CUSTOM = 9, // arbitrary sensor angles, e.g. for external sensors
} sensor_align_e;
4. 实例
注:始终采用Y轴方向朝前进行变换。相关映射,后续会补充,其主要原因,会随着底层分析深入,给出答案!
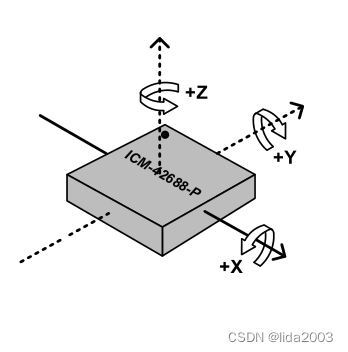
4.1 I n v e n s e n s e v 3 : : I C M 42688 P Invensensev3::ICM42688P Invensensev3::ICM42688P
正常旋转获得结果,XYZ轴重叠。
- APM/PX4:ROTATION_ROLL_180_YAW_90
- betaflight/inav:CW90_DEG
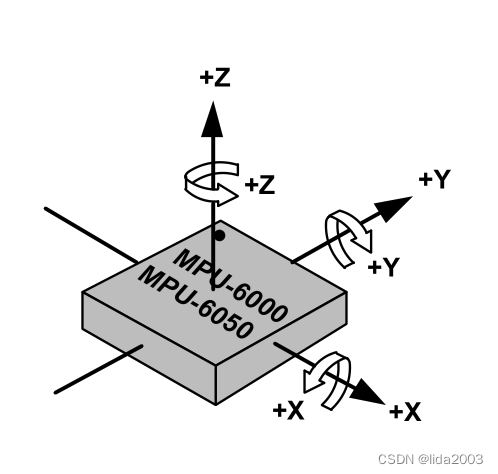
4.2 I n v e n s e n s e : : M P U 600 0 ∗ Invensense::MPU6000^* Invensense::MPU6000∗
非正常旋转,Y变成X、X变成Y、Z反向,需要驱动底层代码配合,以保持物理方向与应用的一致性。
- APM/PX4:ROTATION_NONE
- betaflight/inav:CW90_DEG
4.3 I n v e n s e n s e : : M P U 650 0 ∗ Invensense::MPU6500^* Invensense::MPU6500∗
非正常旋转,Y变成X、X变成Y、Z反向,需要驱动底层代码配合,以保持物理方向与应用的一致性。
- APM/PX4:ROTATION_NONE
- betaflight/inav:CW90_DEG

5. 参考资料
【1】BetaFlight深入传感设计之九:传感坐标系/机体坐标系/导航坐标系/经纬度坐标系
【2】BetaFlight深入传感设计之八:坐标系
【3】BetaFlight深入传感设计之五:MahonyAHRS & 方向余弦矩阵理论
【4】PX4-Flight Controller/Sensor Orientation
【5】betaflight-Flight-Controller-Orientation
【6】GeoGebra - 数学教学软件
【7】Ardupilot开源飞控之Invensense IMUs
6. 补充资料-常见bf-apm映射
# betaflight sensor alignment is a mysterious art
# some of these might be right but you should always check
alignment = {
"CW0" : "ROTATION_YAW_270",
"CW90" : "ROTATION_NONE",
"CW180" : "ROTATION_YAW_90",
"CW270" : "ROTATION_YAW_180",
"CW0FLIP" : "ROTATION_ROLL_180_YAW_270",
"CW90FLIP" : "ROTATION_ROLL_180",
"CW180FLIP" : "ROTATION_ROLL_180_YAW_90",
"CW270FLIP" : "ROTATION_PITCH_180",
"DEFAULT" : "ROTATION_NONE",
}
智能推荐
linux devkmem 源码,linux dev/mem dev/kmem实现访问物理/虚拟内存-程序员宅基地
文章浏览阅读451次。dev/mem: 物理内存的全镜像。可以用来访问物理内存。/dev/kmem: kernel看到的虚拟内存的全镜像。可以用来访问kernel的内容。调试嵌入式Linux内核时,可能需要查看某个内核变量的值。/dev/kmem正好提供了访问内核虚拟内存的途径。现在的内核大都默认禁用了/dev/kmem,打开的方法是在 make menuconfig中选中 device drivers --> ..._dev/mem 源码实现
vxe-table 小众但功能齐全的vue表格组件-程序员宅基地
文章浏览阅读7.1k次,点赞2次,收藏19次。vxe-table,一个小众但功能齐全并支持excel操作的vue表格组件_vxe-table
(开发)bable - es6转码-程序员宅基地
文章浏览阅读62次。参考:http://www.ruanyifeng.com/blog/2016/01/babel.htmlBabelBabel是一个广泛使用的转码器,可以将ES6代码转为ES5代码,从而在现有环境执行// 转码前input.map(item => item + 1);// 转码后input.map(function (item) { return item..._让开发环境支持bable
FPGA 视频处理 FIFO 的典型应用_fpga 频分复用 视频-程序员宅基地
文章浏览阅读2.8k次,点赞6次,收藏29次。摘要:FPGA视频处理FIFO的典型应用,视频输入FIFO的作用,视频输出FIFO的作用,视频数据跨时钟域FIFO,视频缩放FIFO的作用_fpga 频分复用 视频
R语言:设置工作路径为当前文件存储路径_r语言设置工作目录到目标文件夹-程序员宅基地
文章浏览阅读575次。【代码】R语言:设置工作路径为当前文件存储路径。_r语言设置工作目录到目标文件夹
background 线性渐变-程序员宅基地
文章浏览阅读452次。格式:background: linear-gradient(direction, color-stop1, color-stop2, ...);<linear-gradient> = linear-gradient([ [ <angle> | to <side-or-corner>] ,]? &l..._background线性渐变
随便推点
【蓝桥杯省赛真题39】python输出最大的数 中小学青少年组蓝桥杯比赛 算法思维python编程省赛真题解析-程序员宅基地
文章浏览阅读1k次,点赞26次,收藏8次。第十三届蓝桥杯青少年组python编程省赛真题一、题目要求(注:input()输入函数的括号中不允许添加任何信息)1、编程实现给定一个正整数N,输出正整数N中各数位最大的那个数字。例如:N=132,则输出3。2、输入输出输入描述:只有一行,输入一个正整数N输出描述:只有一行,输出正整数N中各数位最大的那个数字输入样例:
网络协议的三要素-程序员宅基地
文章浏览阅读2.2k次。一个网络协议主要由以下三个要素组成:1.语法数据与控制信息的结构或格式,包括数据的组织方式、编码方式、信号电平的表示方式等。2.语义即需要发出何种控制信息,完成何种动作,以及做出何种应答,以实现数据交换的协调和差错处理。3.时序即事件实现顺序的详细说明,以实现速率匹配和排序。不完整理解:语法表示长什么样,语义表示能干什么,时序表示排序。转载于:https://blog.51cto.com/98..._网络协议三要素csdn
The Log: What every software engineer should know about real-time data's unifying abstraction-程序员宅基地
文章浏览阅读153次。主要的思想,将所有的系统都可以看作两部分,真正的数据log系统和各种各样的query engine所有的一致性由log系统来保证,其他各种query engine不需要考虑一致性,安全性,只需要不停的从log系统来同步数据,如果数据丢失或crash可以从log系统replay来恢复可以看出kafka系统在linkedin中的重要地位,不光是d..._the log: what every software engineer should know about real-time data's uni
《伟大是熬出来的》冯仑与年轻人闲话人生之一-程序员宅基地
文章浏览阅读746次。伟大是熬出来的 目录 前言 引言 时间熬成伟大:领导者要像狼一样坚忍 第一章 内圣外王——领导者的心态修炼 1. 天纵英才的自信心 2. 上天揽月的企图心 3. 誓不回头的决心 4. 宠辱不惊的平常心 5. 换位思考的同理心 6. 激情四射的热心 第二章 日清日高——领导者的高效能修炼 7. 积极主动,想到做到 8. 合理掌控自己的时间和生命 9. 制定目标,马..._当狼拖着受伤的右腿逃生时,右腿会成为前进的阻碍,它会毫不犹豫撕咬断自己的腿, 以
有源光缆AOC知识百科汇总-程序员宅基地
文章浏览阅读285次。在当今的大数据时代,人们对高速度和高带宽的需求越来越大,迫切希望有一种新型产品来作为高性能计算和数据中心的主要传输媒质,所以有源光缆(AOC)在这种环境下诞生了。有源光缆究竟是什么呢?应用在哪些领域,有什么优势呢?易天将为您解答!有源光缆(Active Optical Cables,简称AOC)是两端装有光收发器件的光纤线缆,主要构成部件分为光路和电路两部分。作为一种高性能计..._aoc 光缆
浏览器代理服务器自动配置脚本设置方法-程序员宅基地
文章浏览阅读2.2k次。在“桌面”上按快捷键“Ctrl+R”,调出“运行”窗口。接着,在“打开”后的输入框中输入“Gpedit.msc”。并按“确定”按钮。如下图 找到“用户配置”下的“Windows设置”下的“Internet Explorer 维护”的“连接”,双击选择“自动浏览器配置”。如下图 选择“自动启动配置”,并在下面的“自动代理URL”中填写相应的PAC文件地址。如下..._設置proxy腳本