【ROS】launch文件详解
标签: 人工智能

标签: 人工智能
launch,中文含义是启动,launch文件顾名思义就是启动文件。在节点少,程序小的情况下可以一个一个节点来启动,测试运行效果;但是当工程规模大,需要的节点多时就显得比较费劲,用.launch文件来启动可以将需要的...
ROS launch文件编写说明
有些功能包launch以后只能打开gazebo,不能进行rviz的显示,下面展示如何将rviz写入launch文件,则以后launch的时候直接就能够在rviz中显示。 首先,launch一下,如 roslaunch mrobot_gazebo view_mrobot_with_...
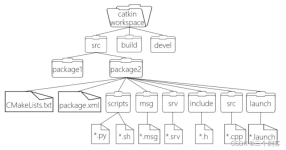
本篇博客主要围绕ROS(Robot Operating System)中的launch文件使用展开,详细记录了launch文件的基本概念、编写方法以及在实际应用中的经验和技巧。首先,博客介绍了launch文件在ROS中的作用,它作为XML格式的文件...
在ROS2中launch文件有三种格式,pythonmxlyaml。其中ROS2官方推荐使用python来编写launch文件,原因在于python是一种编程语言,更加灵活,可以完成许多别的特性。这里主要介绍如何使用python来编写launch文件。
编写launch文件可以有三种方式,python、yaml、xml这三种方式,但是官方推荐的是使用python格式,因为python是一种编程语言,可以使用python的一些库来进行一些工作。它允许我们可以同时和配置多个包含ROS2节点的可...
标签: launch
ros launch 深入理解launch roslaunch 包包含roslaunch工具,也包含了各种其他支持的工具来帮助你使用这些文件,许多ros包都包含roslaunch files,可以运行下面这些指令
【ROS教程】编写launch文件
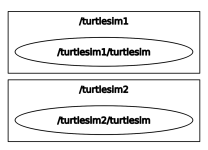
这些节点具有不同的命名空间或名称,但仍然具有相同的参数。启动文件将调出不同的节点,负责模拟两个turtlesim 模拟、启动 TF 广播器和监听器、加载...首先,我们将创建一个顶层启动文件,该文件将调用单独的启动文件。

使用launch文件,可以同时运行多个节点。launch文件是一 种遵循XML语法的描述文件,批量启动ROS节点只是它的功能之一。以下是XML的基本语法之一:描述一组多层嵌套的数据结构,就是XML语言的主要作用之一。例如下述...
文件中执行顺序的原因可能不能将所有参数都导出,所以可以自己再编写一个。文件中执行顺序的原因可能不能将所有参数都导出,所以可以自己再编写一个。如果节点退出,是否自动重启(对于某些重要的功能要自动重启)。...
ROS:launch启动文件的使用方法
标签: ros
Launch文件:通过XML文件实现多节点的配置和启动(可自动启动ROS Master) <launch>:launch文件中的根元素采用标签定义
使用launch文件启动turtlebot键盘控制功能 使用launch文件启动发布者、订阅者程序
识点,真正体系化!**
标签: 人工智能
上面的launch文件首先声明了一些参数,之后include另一个launch文件,included.launch文件中的节点会按深度优先执行配置和启动;参数声明,arg_1 通过命令行传递,arg_2 传递到included.launch, arg_3 默认值可以被...

手把手教你编写launch文件启动节点
文件是为了方便地启动一组相关的节点(nodes)、参数服务器(parameter server)参数、消息发布者/订阅者(publishers/subscribers)、服务(services)以及动作...: 所有launch文件都以XML格式编写,需包含根元素。
单独调试单独输出一个窗口。问题只有一个话题内容。
本文介绍了ROS系统中的launch文件相关知识点。

标签: python
roslaunch可以用来启动定义在launch文件中的多个节点,且不需要提前roscore。 roslaunch的使用方法为: $ roslaunch pkg-name launch-file-name 创建turtlemimic.launch文件 <launch> <group ns=...
1 使用launch文件 Launch文件是ROS提供的,可以同时运行多个nodes的文件。Launch文件以一种特殊的XML格式编写,在ROS packages中使用广泛。 1.1 运行launch文件 $ roslaunch package_name launch_file_name Eg...
Launch文件是ROS(Robot Operating System)中的一个重要组件,用于启动和配置ROS节点和进程。Launch文件通常使用XML格式编写,其中包含ROS节点的名称,参数,运行条件,依赖项等信息。上面的示例包含两个节点和一个...
使用ROS时,经常需要启动多个launch文件,有时一个个启动太麻烦,可以通过编写sh脚本实现快捷启动。