”ROS教程“ 的搜索结果
安装ROS教程安装ROS教程
标签: 文档资料
安装ROS教程安装ROS教程安装ROS教程安装ROS教程安装ROS教程安装ROS教程安装ROS教程安装ROS教程安装ROS教程安装ROS教程安装ROS教程安装ROS教程安装ROS教程安装ROS教程安装ROS教程安装ROS教程安装ROS教程安装ROS教程...
ROS教程 以任务为中心的课程中的ROS教程。 像Coursera这样的有条理的每周安排组织的任务,但是没有专业的联系。 完美吧? 课程长度为n周,分为任务。 为了更好地帮助本课程,请在此存储库上提出问题,以便其他人...
本文档是B站视频配套笔记,视频地址:https://space.bilibili.com/411541289/channel/collectiondetail?sid=693700 笔记配套的 ROS 源码仓库地址:https://github.com/yym68686/ROS-Lab

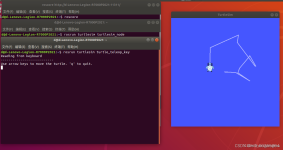
安装成功的Ubuntu系统自带的工具下载速度慢,不太好用,所以我们可以使用国内稳定高速且免费的镜像网站。当出现有一个海龟的窗口,证明运行成功了,我们用鼠标聚焦第三个终端窗口,便可以通过按下 ↑ ↓ ← →键来对...
安装ROS


ROS教程,最全最详的中文教程,详细介绍了ROS从安装到详细配置的知识
创建工作空间目录(即工程根目录,注意此时还不是ROS工作空间,只是一个目录)初始化工作空间(即把当前目录初始化为一个ROS工作空间)创建功能包(ROS基本单元,可以理解为一个功能模块,每个工程至少有一个功能包...
在该功能包下创建include、src、launch、urdf、world文件夹,在urdf文件下创建urdf文件夹和xacro文件夹。
创建工作空间目录(即工程根目录,注意此时还不是ROS工作空间,只是一个目录)初始化工作空间(即把当前目录初始化为一个ROS工作空间)创建功能包(ROS基本单元,可以理解为一个功能模块,每个工程至少有一个功能包...


ros教程V5版 余松
标签: ros V5 余松
ros教程V5版 余松版本
在该功能包下创建include、src、launch、、world、map文件夹,在urdf文件下创建urdf文件夹和xacro文件夹。
在该功能包下创建config、include、src、launch、urdf、map文件夹,在urdf文件下创建urdf文件夹和xacro文件夹,复制meshes文件夹到该功能包下。还有meshes利用之前的哪个文件复制到当前功能包下。
irvs_ros_tutorials ros教程
ROS教程v5图文并茂
标签: ROS教程
ROS教程v5图文并茂,5.x最新最全的教程
1、启动gazebo,按下Ctrl+B键,进入编辑器,界面如下: 虚拟环境创建工具:旁边是虚拟建筑墙,窗,门,和墙纸上面的白图是2D图像,下面是3D图像2、将地图创建好之后,按下File,然后选择Exit Building Editor,如下...
在该功能包下创建config、include、src、launch、urdf、map文件夹,在urdf文件下创建urdf文件夹和xacro文件夹,复制meshes文件夹到该功能包下。还有meshes利用之前的哪个文件复制到当前功能包下。
带有ROS的教程:在我的频道上查找视频 -------设置ROS_MASTER_URI -----------如果ROS Master在Raspberry Pi上运行,则需要设置export ROS_MASTER_URI = 如果您在本地主机上运行ROS Master,请设置export ROS_...

写这篇文章是因为发现网上这个22.04版本ROS安装教程很少,而且查得到的安装的时候都出现了bug,为了大家的方便,在安装好ROS后第一时间将安装坑点与教程重新编写了一次,希望大家不要在这里浪费太多时间,把饭喂到...
本专栏旨在通过对ROS2的系统学习,掌握ROS2底层基本分布式原理,并具有机器人建模和应用ROS2进行实际项目的开发和调试的工程能力。《ROS2从入门到精通》**ROS(Robot Operating System)**是一个适用于机器人的开源...
ROS1教程(韩文) ROS安装 rospy教程 1.初学者水平 参数使用情况日志收集 Python路径设置 numpy的用法 2.中级 发布消息 压缩图像发布者/订阅者 3.机器人控制 1.turtlesim 2. Turtlebot 3 左右旋转 移至目标点1 移...

赵虚左 哔站ROS教程前三章 代码
推荐文章
- 记录CentOS7 Linux下安装MySQL8_适合正式环境_干货满满(超详细,默认开启了开机自启动,设置表名忽略大小写,提供详细配置,创建非root专属远程连接用户)_centos7安装mysql8-程序员宅基地
- python 读取grib \grib2-程序员宅基地
- Kimi Chat,不仅仅是聊天!深度剖析Kimi Chat 5大使用场景!-程序员宅基地
- Datawhale-集成学习-学习笔记Day4-Adaboost-程序员宅基地
- TexStudio配置以及解决无法Build&View_texstudio 无法启动 build & view:pdflatex:"d:/data/texl-程序员宅基地
- 用户空间访问I2C设备驱动-程序员宅基地
- 人脸识别算法初次了解-程序员宅基地
- maven的pom文件学习-程序员宅基地
- wamp mysql 没有启动,WAMP中mysql服务突然无法启动 解决方法-程序员宅基地
- 《树莓派Python编程入门与实战(第2版)》——3.7 创建Python脚本-程序员宅基地