ROS保姆级0基础入门教程 |第一章 ROS的概述与环境搭建(4万字教程,建议收藏)-程序员宅基地
技术标签: 机器人 melodic ubuntu ROS ros sudo
目录
1 ROS简介
ROS诞生背景
机器人是一种高度复杂的系统性实现,机器人设计包含了机械加工、机械结构设计、硬件设计、嵌入式软件设计、上层软件设计…是各种硬件与软件集成,甚至可以说机器人系统是当今工业体系的集大成者。
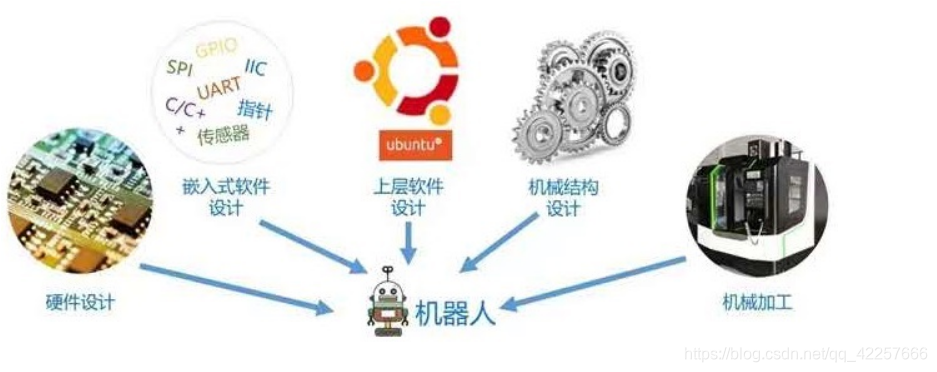
机器人体系是相当庞大的,其复杂度之高,以至于没有任何个人、组织甚至公司能够独立完成系统性的机器人研发工作。
一种更合适的策略是:让机器人研发者专注于自己擅长的领域,其他模块则直接复用相关领域更专业研发团队的实现,当然自身的研究也可以被他人继续复用。这种基于"复用"的分工协作,遵循了不重复发明轮子的原则,显然是可以大大提高机器人的研发效率的,尤其是随着机器人硬件越来越丰富,软件库越来越庞大,这种复用性和模块化开发需求也愈发强烈。
在此大背景下,于 2007 年,一家名为 柳树车库(Willow Garage) 的机器人公司发布了 ROS(机器人操作系统),ROS是一套机器人通用软件框架,可以提升功能模块的复用性,并且随着该系统的不断迭代与完善,如今 ROS 已经成为机器人领域的事实标准。

1.1 ROS概念
ROS全称Robot Operating System(机器人操作系统)
ROS是适用于机器人的开源元操作系统;
ROS集成了大量的工具,库,协议,提供类似OS所提供的功能,简化对机器人的控制;
还提供了用于在多台计算机上获取,构建,编写和运行代码的工具和库,ROS在某些方面类似于“机器人框架”;
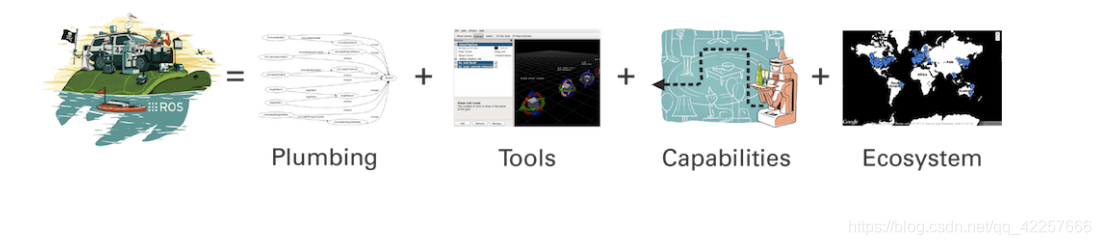
ROS设计者将ROS表述为“ROS = Plumbing + Tools + Capabilities + Ecosystem”,即ROS是通讯机制、工具软件包、机器人高层技能以及机器人生态系统的集合体。
1.2 ROS设计目标
机器人开发的分工思想,实现了不同研发团队间的共享和协作,提升了机器人的研发效率,为了服务“ 分工”,ROS主要设计了如下目标:
- 复用:ROS的目标不是成为具有最多功能的框架,ROS的主要目标是支持机器人技术研发中的代码重用。
- 分布式:ROS是进程(也称为Nodes)的分布式框架,ROS中的进程可分布于不同主机,不同主机协同工作,从而分散计算压力
- 松耦合:ROS中功能模块封装于独立的功能包或元功能包,便于分享,功能包内的模块以节点为单位运行,以ROS标准的IO作为接口,开发者不需要关注模块内部实现,只要了解接口规则就能实现复用,实现了模块间点对点的松耦合连接
- 精简:ROS被设计为尽可能精简,以便为ROS编写的代码可以与其他机器人软件框架一起使用。ROS易于与其他机器人软件框架集成:ROS已与OpenRAVE,Orocos和Player集成。
- 语言独立性:包括Java,C++,Python等。为了支持更多应用开发和移植,ROS设计为一种语言弱相关的框架结构,使用简洁,中立的定义语言描述模块间的消息接口,在编译中再产生所使用语言的目标文件,为消息交互提供支持,同时允许消息接口的嵌套使用
- 易于测试:ROS具有称为rostest的内置单元/集成测试框架,可轻松安装和拆卸测试工具。
- 大型应用:ROS适用于大型运行时系统和大型开发流程。
- 丰富的组件化工具包:ROS可采用组件化方式集成一些工具和软件到系统中并作为一个组件直接使用,如RVIZ(3D可视化工具),开发者根据ROS定义的接口在其中显示机器人模型等,组件还包括仿真环境和消息查看工具等
- 免费且开源:开发者众多,功能包多
1.3 ROS发展历程
ROS是一个由来已久、贡献者众多的大型软件项目。在ROS诞生之前,很多学者认为,机器人研究需要一个开放式的协作框架,并且已经有不少类似的项目致力于实现这样的框架。在这些工作中,斯坦福大学在2000年年中开展了一系列相关研究项目,如斯坦福人工智能机器人(STandford AI Robot, STAIR)项目、个人机器人(Personal Robots, PR)项目等,在上述项目中,在研究具有代表性、集成式人工智能系统的过程中,创立了用于室内场景的高灵活性、动态软件系统,其可以用于机器人学研究。
2007年,柳树车库(Willow Garage)提供了大量资源,用于将斯坦福大学机器人项目中的软件系统进行扩展与完善,同时,在无数研究人员的共同努力下,ROS的核心思想和基本软件包逐渐得到完善。
ROS的发行版本(ROS distribution) 指ROS软件包的版本,其与Linux的发行版本(如Ubuntu)的概念类似。推出ROS发行版本的目的在于使开发人员可以使用相对稳定的代码库,直到其准备好将所有内容进行版本升级为止。因此,每个发行版本推出后,ROS开发者通常仅对这一版本的bug进行修复,同时提供少量针对核心软件包的改进。
版本特点: 按照英文字母顺序命名,ROS 目前已经发布了ROS1 的终极版本: noetic,并建议后期过渡至 ROS2 版本。noetic 版本之前默认使用的是 Python2,noetic 支持 Python3。
建议版本: noetic 或 melodic 或 kinetic

2 ROS安装
我使用的是 ROS 版本是 Melodic,那么可以在 ubuntu18.04、Mac 或 windows10 系统上安装,虽然一般用户平时使用的操作系统以windows居多,但是ROS之前的版本基本都不支持windows,所以当前我们选用的操作系统是 ubuntu,以方便向历史版本过渡。ubuntu安装常用方式有两种:
-
实体机安装 ubuntu (较为常用的是使用双系统,windows 与 ubuntu 并存);
-
虚拟机安装 ubuntu。
两种方式比较,各有优缺点:
- 方案1可以保证性能,且不需要考虑硬件兼容性问题,但是和windows系统交互不便;
- 方案2可以方便的实现 windows 与 ubuntu 交互,不过性能稍差,且与硬件交互不便。
在 ROS 中,一些仿真操作是比较耗费系统资源的,且经常需要和一些硬件(雷达、摄像头、imu、STM32、arduino…)交互,因此,原则上建议采用方案1,不过如果只是出于学习目的,那么方案2也基本够用,且方案2在windows与ubuntu的交互上更为方便,对于学习者更为友好。当然,具体采用哪种实现方案,请按需选择。我选择的是安装双系统。
如果采用虚拟机安装 ubuntu,再安装 ROS 的话,大致流程如下:
安装虚拟机软件(比如:virtualbox 或 VMware);
使用虚拟机软件虚拟一台主机;
在虚拟主机上安装 ubuntu 18.04;
在 ubuntu 上安装 ROS;
测试 ROS 环境是否可以正常运行。
虚拟机软件选择上,对于我们学习而言 virtualbox 和 VMware 都可以满足需求,二者比较,前者免费,后者收费,所以尽量选用 virtualbox。
2.1安装ubuntu
对应于ROS melodic版本,我们需要安装的是ubuntu18.04,具体安装教程网上有很多,建议选择访问量最高的那个。还有,不管是虚拟机还是双系统,ubuntu18.04的镜像文件一定要选好,这个影响到后面很多东西,有的镜像文件缺少东西,会出各种错误,什么都需要自己手动配置,为了减少不必要的麻烦,还是选择权威些的镜像文件。
2.2 安装 ROS
Ubuntu 安装完毕后,就可以安装 ROS 操作系统了,大致步骤如下:
- 配置ubuntu的软件和更新;
- 设置安装源;
- 设置key;
- 安装;
- 配置环境变量。
1.配置ubuntu的软件和更新
配置ubuntu的软件和更新,允许安装不经认证的软件。
首先打开“软件和更新”对话框,具体可以在 Ubuntu 搜索按钮中搜索。
打开后按照下图进行配置(确保勾选了"restricted", “universe,” 和 “multiverse.”)

2.设置安装源
官方默认安装源:
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
或来自国内清华的安装源
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
或来自国内中科大的安装源
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
PS: 回车后,可能需要输入管理员密码;建议使用国内资源,安装速度更快。
3.设置key
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
4.安装
首先需要更新 apt(以前是 apt-get, 官方建议使用 apt 而非 apt-get),apt 是用于从互联网仓库搜索、安装、升级、卸载软件或操作系统的工具。
sudo apt update
等待…
然后,再安装所需类型的 ROS:ROS 多个类型:Desktop-Full、Desktop、ROS-Base。这里介绍较为常用的Desktop-Full(官方推荐)安装: ROS, rqt, rviz, robot-generic libraries, 2D/3D simulators, navigation and 2D/3D perception
sudo apt install ros-melodic-desktop-full
等待…(比较耗时)
友情提示: 由于网络原因,导致连接超时,可能会安装失败,如下所示:
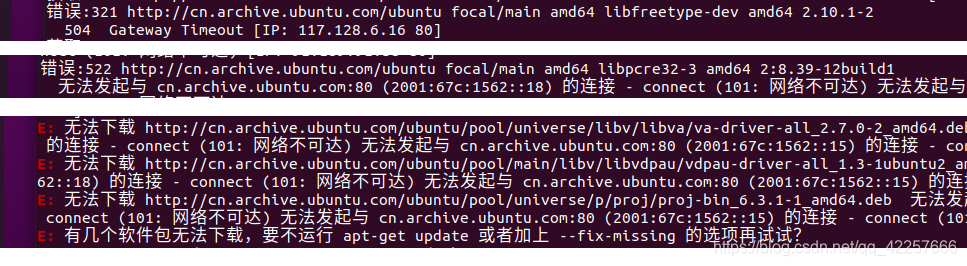
可以多次重复调用 更新 和 安装命令,直至成功。
5.环境设置
配置环境变量,方便在任意 终端中使用 ROS。
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
6.安装构建依赖
首先安装构建依赖的相关工具
sudo apt install python-rosdep python-rosinstall python-rosinstall-generator python-wstool build-essential
然后安装rosdep(可以安装系统依赖)
sudo apt install python-rosdep
初始化rosdep
sudo rosdep init
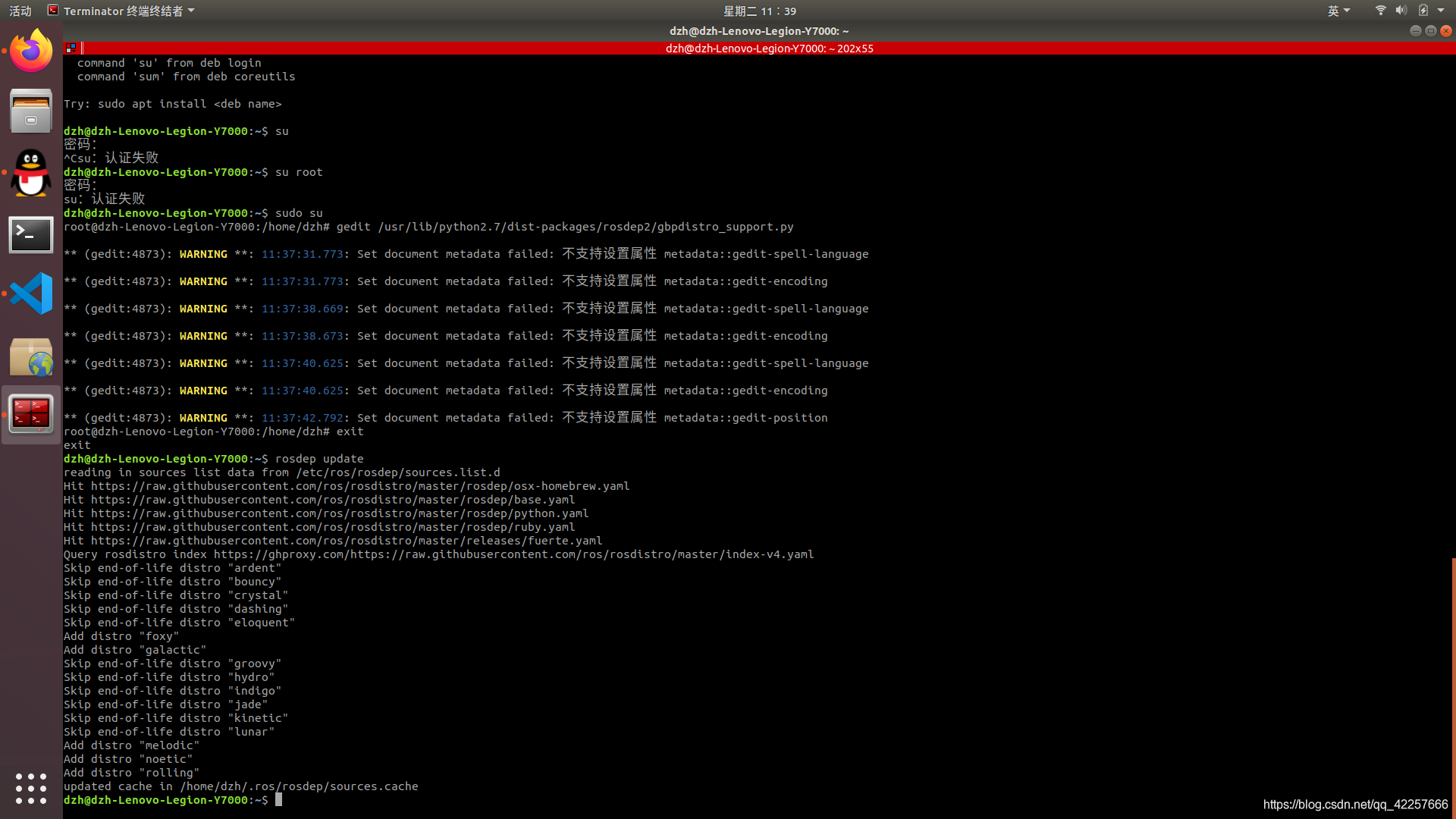
rosdep update
当执行到最后 sudo rosdep init 和rosdep时,绝大多数人都会抛出异常。因为境外资源被屏蔽,而且墙在今年4月份时候还被加高了,所以翻墙也很困难了。
这里给出解决方法:rosdep报错最有效方法
我参考这篇博客成功rosdep update!
卸载
如果需要卸载ROS可以调用如下命令:
sudo apt remove ros-melodic-*
另请参考:ROS wiki
2.3 测试 ROS
ROS 内置了一些小程序,可以通过运行这些小程序以检测 ROS 环境是否可以正常运行
- 首先启动三个命令行(ctrl + alt + T)
- 命令行1键入:roscore
- 命令行2键入:rosrun turtlesim turtlesim_node(此时会弹出图形化界面)
- 命令行3键入:rosrun turtlesim turtle_teleop_key(在3中可以通过上下左右控制2中乌龟的运动)
最终结果如下所示:
智能推荐
如何配置DNS服务的正反向解析_dns反向解析-程序员宅基地
文章浏览阅读3k次,点赞3次,收藏13次。root@server ~]# vim /etc/named.rfc1912.zones #添加如下内容,也可直接更改模板。[root@server ~]# vim /etc/named.conf #打开主配置文件,将如下两处地方修改为。注意:ip地址必须反向书写,这里文件名需要和反向解析数据文件名相同。新建或者拷贝一份进行修改。nslookup命令。_dns反向解析
设置PWM占空比中TIM_SetCompare1,TIM_SetCompare2,TIM_SetCompare3,TIM_SetCompare4分别对应引脚和ADC通道对应引脚-程序员宅基地
文章浏览阅读2.5w次,点赞16次,收藏103次。这个函数TIM_SetCompare1,这个函数有四个,分别是TIM_SetCompare1,TIM_SetCompare2,TIM_SetCompare3,TIM_SetCompare4。位于CH1那一行的GPIO口使用TIM_SetCompare1这个函数,位于CH2那一行的GPIO口使用TIM_SetCompare2这个函数。使用stm32f103的除了tim6和tim7没有PWM..._tim_setcompare1
多线程_进程和线程,并发与并行,线程优先级,守护线程,实现线程的四种方式,线程周期;线程同步,线程中的锁,Lock类,死锁,生产者和消费者案例-程序员宅基地
文章浏览阅读950次,点赞33次,收藏19次。多线程_进程和线程,并发与并行,线程优先级,守护线程,实现线程的四种方式,线程周期;线程同步,线程中的锁,Lock类,死锁,生产者和消费者案例
在 Linux 系统的用户目录下安装 ifort 和 MKL 库并配置_在linux系统的用户目录下安装ifort和mkl库并配置-程序员宅基地
文章浏览阅读2.9k次。ifort 编译器的安装ifort 编译器可以在 intel 官网上下载。打开https://software.intel.com/content/www/us/en/develop/tools/oneapi/components/fortran-compiler.html#gs.7iqrsm点击网页中下方处的 Download, 选择 Intel Fortran Compiler Classic and Intel Fortran Compiler(Beta) 下方对应的版本。我选择的是 l_在linux系统的用户目录下安装ifort和mkl库并配置
使用ftl文件生成图片中图片展示无样式,不显示_ftl格式pdf的样式调整-程序员宅基地
文章浏览阅读689次,点赞7次,收藏8次。些项目时需要一个生成图片的方法,我在网上找到比较方便且适合我去设置一些样式的生成方式之一就是使用Freemarker,在对应位置上先写好一个html格式的ftl文件,在对应位置用${参数名}填写上。还记得当时为了解决图片大小设置不上,搜索了好久资料,不记得是在哪看到的需要在里面使用width与height直接设置,而我当时用style去设置,怎么都不对。找不到,自己测试链接,准备将所有含有中文的图片链接复制一份,在服务器上存储一份不带中文的文件。突然发现就算无中文,有的链接也是打不开的。_ftl格式pdf的样式调整
orin Ubuntu 20.04 配置 Realsense-ROS_opt/ros/noetic/lib/nodelet/nodelet: symbol lookup -程序员宅基地
文章浏览阅读1.5k次,点赞6次,收藏12次。拉取librealsense。_opt/ros/noetic/lib/nodelet/nodelet: symbol lookup error: /home/admin07/reals
随便推点
操作系统精选习题——第四章_系统抖动现象的发生由什么引起的-程序员宅基地
文章浏览阅读3.4k次,点赞3次,收藏29次。一.单选题二.填空题三.判断题一.单选题静态链接是在( )进行的。A、编译某段程序时B、装入某段程序时C、紧凑时D、装入程序之前Pentium处理器(32位)最大可寻址的虚拟存储器地址空间为( )。A、由内存的容量而定B、4GC、2GD、1G分页系统中,主存分配的单位是( )。A、字节B、物理块C、作业D、段在段页式存储管理中,当执行一段程序时,至少访问()次内存。A、1B、2C、3D、4在分段管理中,( )。A、以段为单位分配,每._系统抖动现象的发生由什么引起的
UG NX 12零件工程图基础_ug-nx工程图-程序员宅基地
文章浏览阅读2.4k次。在实际的工作生产中,零件的加工制造一般都需要二维工程图来辅助设计。UG NX 的工程图主要是为了满足二维出图需要。在绘制工程图时,需要先确定所绘制图形要表达的内容,然后根据需要并按照视图的选择原则,绘制工程图的主视图、其他视图以及某些特殊视图,最后标注图形的尺寸、技术说明等信息,即可完成工程图的绘制。1.视图选择原则工程图合理的表达方案要综合运用各种表达方法,清晰完整地表达出零件的结构形状,并便于看图。确定工程图表达方案的一般步骤如下:口分析零件结构形状由于零件的结构形状以及加工位置或工作位置的不._ug-nx工程图
智能制造数字化工厂智慧供应链大数据解决方案(PPT)-程序员宅基地
文章浏览阅读920次,点赞29次,收藏18次。原文《智能制造数字化工厂智慧供应链大数据解决方案》PPT格式主要从智能制造数字化工厂智慧供应链大数据解决方案框架图、销量预测+S&OP大数据解决方案、计划统筹大数据解决方案、订单履约大数据解决方案、库存周转大数据解决方案、采购及供应商管理大数据模块、智慧工厂大数据解决方案、设备管理大数据解决方案、质量管理大数据解决方案、仓储物流与网络优化大数据解决方案、供应链决策分析大数据解决方案进行建设。适用于售前项目汇报、项目规划、领导汇报。
网络编程socket accept函数的理解_当在函数 'main' 中调用 'open_socket_accept'时.line: 8. con-程序员宅基地
文章浏览阅读2w次,点赞38次,收藏102次。在服务器端,socket()返回的套接字用于监听(listen)和接受(accept)客户端的连接请求。这个套接字不能用于与客户端之间发送和接收数据。 accept()接受一个客户端的连接请求,并返回一个新的套接字。所谓“新的”就是说这个套接字与socket()返回的用于监听和接受客户端的连接请求的套接字不是同一个套接字。与本次接受的客户端的通信是通过在这个新的套接字上发送和接收数_当在函数 'main' 中调用 'open_socket_accept'时.line: 8. connection request fa
C#对象销毁_c# 销毁对象及其所有引用-程序员宅基地
文章浏览阅读4.3k次。对象销毁对象销毁的标准语法Close和Stop何时销毁对象销毁对象时清除字段对象销毁的标准语法Framework在销毁对象的逻辑方面遵循一套规则,这些规则并不限用于.NET Framework或C#语言;这些规则的目的是定义一套便于使用的协议。这些协议如下:一旦销毁,对象不可恢复。对象不能被再次激活,调用对象的方法或者属性抛出ObjectDisposedException异常重复地调用对象的Disposal方法会导致错误如果一个可销毁对象x 包含或包装或处理另外一个可销毁对象y,那么x的Disp_c# 销毁对象及其所有引用
笔记-中项/高项学习期间的错题笔记1_大型设备可靠性测试可否拆解为几个部分进行测试-程序员宅基地
文章浏览阅读1.1w次。这是记录,在中项、高项过程中的错题笔记;https://www.zenwu.site/post/2b6d.html1. 信息系统的规划工具在制订计划时,可以利用PERT图和甘特图;访谈时,可以应用各种调查表和调查提纲;在确定各部门、各层管理人员的需求,梳理流程时,可以采用会谈和正式会议的方法。为把企业组织结构与企业过程联系起来,说明每个过程与组织的联系,指出过程决策人,可以采用建立过程/组织(Process/Organization,P/O)矩阵的方法。例如,一个简单的P/O矩阵示例,其中._大型设备可靠性测试可否拆解为几个部分进行测试