
”ROS“ 的搜索结果
ROS

ROS全称Robot Operating System(机器人操作系统)ROS是适用于机器人的开源元操作系统ROS集成了大量的工具,库,协议,提供类似OS所提供的功能,简化对机器人的控制还提供了用于在多台计算机上获取,构建,编写和运行...
1.ROS2前世今生2.ROS与ROS2对比3.动手安装ROS24.ROS2初体验。
古月居ros入门21讲课件
标签: ros
古月居ros入门21讲古月居ros入门21讲古月居ros入门21讲古月居ros入门21讲古月居ros入门21讲古月居ros入门21讲古月居ros入门21讲古月居ros入门21讲古月居ros入门21讲古月居ros入门21讲古月居ros入门21讲古月居ros入门...

ROS (Robot Operating System, 机器人操作系统) ,包括了四个part:通信机制、开发工具、应用功能、生态系统,是一个适用于机器人的、开源的元操作系统。目标:提高机器人研发中的软件复用率。本文仅仅简单介绍了ROS...
ROS:ROS是什么
在ROS中,有许多重要的模块和组件,用于实现不同功能和提供不同服务。下面是ROS的一些核心模块的详细介绍:1.roscore: roscore是ROS的核心节点,它提供了整个ROS系统的基础功能。roscore负责管理参数服务器、运行时...


ROS机器人开发实践.pdf
标签: 机器人
ROS机器人开发实践
ros2中文指南.pdf
标签: ROS2 AI
ROS2开发中文指南,ROS开发必备。ROS2是新的ROS版本。相对与旧版本更加接近工业化场景,更加稳定,同时功能也更加丰富。


每版的Ubuntu系统版本都有与之对应ROS版本的,每一版ROS都有其对应版本的Ubuntu版本,不可随便装,ubuntu20.04对应ROS1 noetic和ROS2 foxy版本。
ros1和ros2的区别,要点记录
使用PCL实现的欧几里德聚类ROS节点,配合地面过滤可实现较为理想的激光雷达障碍物检测,具体见博客链接:https://blog.csdn.net/AdamShan/article/details/83015570

Debian发行版^_^AI:在Ubuntu 22.04上安装ROS1是可行的,但需要注意ROS1对Ubuntu的支持只到20.04。因此,如果要在22.04上安装ROS1,只能从源码编译安装。目前的机器人相关操作系统还是面向开发者的(developer)。与...
本文将着手探讨如何在 Qt Creator 上编辑 ROS 项目(工作空间)
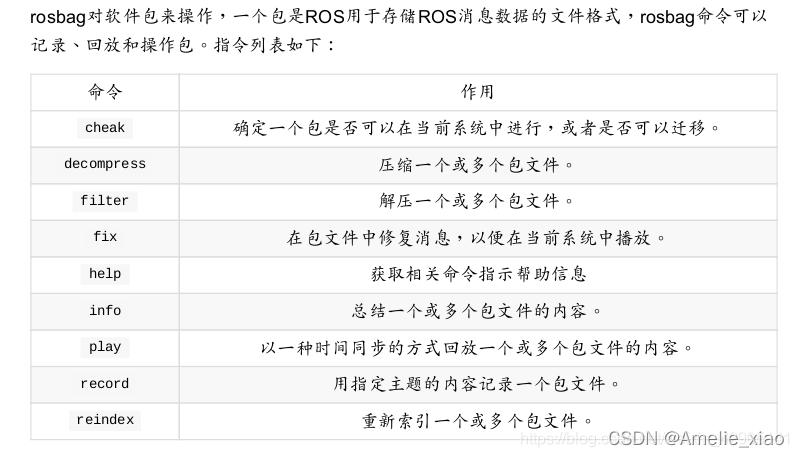
在上一讲开发环境搭建中,我们讲解了如何搭建Ubuntu系统环境和ROS2开发运行环境。类似ros1 master中心节点功能,用于减少节点之间发现的时间。info 显示话题消息类型,订阅者数量,发布者数量。创建功能包命令:指定...

推荐文章
- PyTorch: 点燃深度学习革新之火
- IDEA快速入门
- 网络爬虫之HTTP原理
- 用Keil调试STM32F407ZET6时,出现no cortex-m sw device found报错!_keil no cortexm sw-程序员宅基地
- 大数据之Hadoop进行文件管理_如何扩展hadoop文件系统的功能,使其具有更加强大的文件管理的功能。-程序员宅基地
- VBS 删除非空文件夹_vba 删除不为空的文件夹-程序员宅基地
- Java的继承内存分析_java 继承的内存空间理解-程序员宅基地
- Redis(七)------redis哨兵机制的实现_查看redis端口号存储数据大小-程序员宅基地
- U盘引导安装centos7_centos7 u盘引导-程序员宅基地
- hdu 1300 (dp)-程序员宅基地