掌握动态规划方法贪心算法思想 掌握最优子结构原理 了解动态规划一般问题 二、实验内容 编写一个简单的程序,解决0-1背包问题。设N=5,C=10,w={2,2,6,5,4},v={6,3,5,4,6} 合唱队形安排问题 【问题描述】N位...
”规划算法“ 的搜索结果
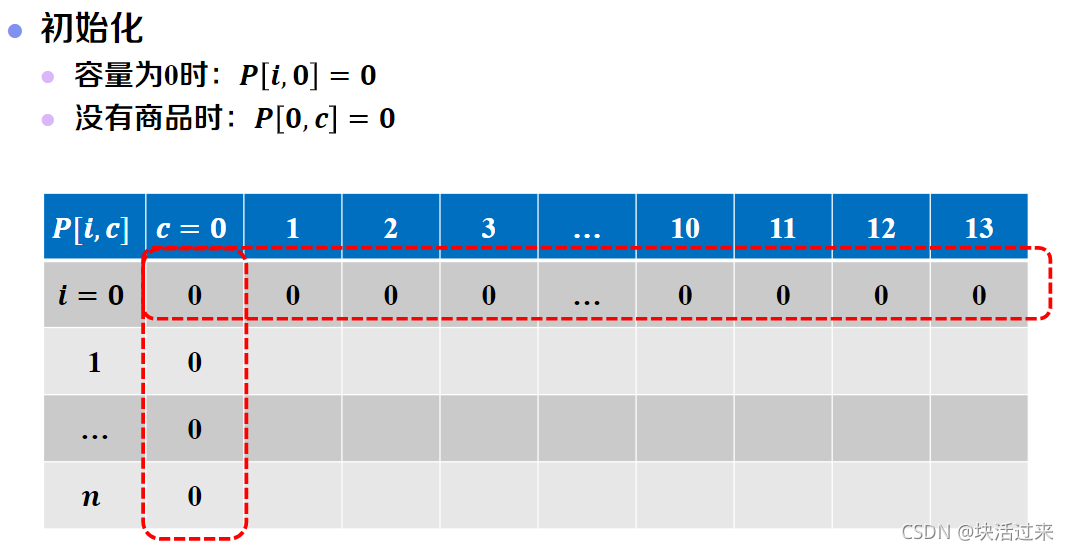
实验目标实验目标: (1)掌握用动态规划方法求解实际问题的基本思路。...(2)进一步理解动态规划方法的实质,巩固设计动态规划算法的基本步骤。 实验任务: (1) 实现0-1背包问题的动态规划算法
根据车辆导航系统的研究历程 , 车辆路径规划算法可分为静态路径规划算法和动态路径算法。静态路径规划是以物理地理信息和交通规则等条件为约束来寻求最短路径,静态路径规划算法已日趋成熟 , 相对比较简单 , 但对于...
动态规划算法:多阶段决策过程,每步求解的问题是后面阶段求解问题的子问题,每步决策将依赖于以前步骤的决策结果; 2、使用动态规划技术的必要条件:满足优化原则 优化原则: 一个最优决策序列的任何子序列本身...
【导语】:一个实现了机器人技术中常用的路径规划算法的开源库,还有动图直观演示运行过程。该库公开时间不长,在 GitHub 已有 1200+ Star。 简介 在机器人研究领域,给定某一特定任务之后,如何规划机器人的运动...

然而早期的无人机都是按照地面任务规划中心预先计算并设定好的航迹飞行,但是随着无人机所承担的任务越来越复杂,其飞行环境的不确定性,对航迹规划的要求也将越来越高。无人机航迹规划的主要根据任务目标规划满足...
问题提出: 定n个矩阵:A1,A2,…,An,其中Ai与Ai+1是可乘的(i=1,2…,n-1)。确定计算矩阵连乘积的计算次序,使得依此次序计算矩阵连乘积需要的数乘次数最少。输出结果为计算矩阵连乘积的计算次序和最少数乘次数。...


* 动态规划算法 * 应用实例:0-1背包问题(限制每个物品要么拿(1个),要么不拿(0个)) */ public class KnapsackProblem { public static void main(String[] args) { // 每个物品的重量 ...
本文章基于MATLAB的demo,利用两种算法——A*算法与RRT算法实现了特定静态道路模型下的路径规划。


基于搜索的路径规划算法总结
标签: matlab
当然,也存在假设全局地图是部分未知的或完全未知的规划算法,如D*算法,这部分在本文中暂且不涉及。本文涉及的全局规划算法包括: 广度优先算法(Breadth-first Searching,bfs) 深度优先算法(Depth-first ...

本文是阅读“多无人机任务分配与路径规划算法研究_丁家如”文献的学习记录。 一.多无人机任务分配的本质 目前阅读的文献不多,所以对无人机协同任务分配问题看作为多目标优化的问题 二.任务分配数学模型 ...

一种基于A* 算法的动态多路径规划算法 本文转自:http://www.chinaaet.com/article/3000017595 2016年微型机与应用第04期 刘斌,陈贤富,程政 (中国科学技术大学 信息科学技术学院,安徽 合肥 230027) 摘要: 车载...

Lattice算法隶属于规划模块。规划模块以预测模块、routing模块、高精地图和定位的结果作为输入,通过算法,输出一条平稳、舒适、安全的轨迹,交给控制模块去执行。我们可以看到,规划模块在Apollo中是一个承上启下的...
动态规划和贪心算法都是一种递推算法,均由...动态规划算法 1.全局最优解中一定包含某个局部最优解,但不一定包含前一个局部最优解,因此需要记录之前的所有最优解 2.动态规划的关键是状态转移方程,即如何由以求出的
自定义运动规划算法的方法 OMPL学习--第三篇之源码安装Moveit!和OMPL(Melodic版本) Ubuntu18.04-编译安装支持Python运动规划库OMPL OMPL库教程翻译 Ubuntu 下 OMPL 的安装与使用 我个人电脑的系统是ubuntu...
动态规划算法似乎是一种很高深莫测的算法,你会在一些面试或算法书籍的高级技巧部分看到相关内容,什么状态转移方程,重叠子问题,最优子结构等高大上的词汇也可能让你望而却步。 而且,当你去看用动态规划解决某个...
本博文源于屈婉玲教授的《算法设计与分析》,旨在讲述如何降低动态规划算法时间复杂度
状态栅格规划器(State Lattice Planner)是一种基于采样的满足动力学约束的路径规划算法。 1. 为什么需要建立运动学模型 传统的路径规划包括前端的路径搜索和后端的轨迹优化两部分。 以上图无人机的路径规划为例,...
荷兰数学家 E.W.Dijkstra 于 1959 年提出了 Dijkstra 算法,它是一种适用于 非负权值 网络的 单源最短路径算法,同时也是目前求解最短路径问题的理论上最完备、应用最广的经典算法。它可以给出从指定节点到图中其他...
路径规划算法学习Day4-Astar算法前言1.2、matlab实现1.3、20*20地图1.4、50*50地图2.函数解读 前言 算法原理:参考路径规划算法学习Day1 路径规划算法学习Day1 # 1、Astar算法 ## 1.1、地图创建 总所周知:栅格法...
推荐文章
- 用好ASP.NET 2.0的URL映射-程序员宅基地
- C语言等级考试是把题目删了,历年全国计算机的等级考试二级C语言上机考试地训练题目库及答案详解(72页)-原创力文档...-程序员宅基地
- Microsoft Office显示正在更新无法打开的问题_正在更新microsoft 365和office-程序员宅基地
- 非常好的Ansible入门教程(超简单)-程序员宅基地
- 【Gradle-8】Gradle插件开发指南-程序员宅基地
- 使用PL/SQL Developer软件解锁_plsqldev表格锁怎么打开-程序员宅基地
- 【Windows Server 2019】Web服务 IIS 配置与管理——配置 IIS 进阶版 Ⅳ_iis默认路径-程序员宅基地
- 网络中的各层协议_发送消息时各层协议-程序员宅基地
- UCRT: VC 2015 Universal CRT, by Microsoft_vc15rt-程序员宅基地
- 关于EntityFramework 7 开发学习_entiry framework 7 书籍-程序员宅基地