
”规划算法“ 的搜索结果
规划算法
动态规划 动态规划 动态规划 动态规划 动态规划 动态规划
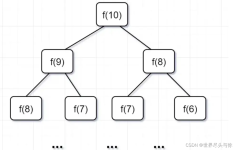
通俗来讲,动态规划算法是解决一类具有重叠子问题和最优子结构性质的问题的有效方法。其基本原理是将大问题分解为小问题,通过保存中间结果来避免重复计算,从而提高算法的效率。动态规划主要包括两个要素:最优子...
本代码包含Dijkstra算法、Floyd算法、RRT算法、A*算法、D*算法等多种路径规划算法的matlab代码,注释明确,能够直接运行,欢迎下载。
(matlab)路径规划算法.zip(matlab)路径规划算法.zip(matlab)路径规划算法.zip(matlab)路径规划算法.zip(matlab)路径规划算法.zip(matlab)路径规划算法.zip(matlab)路径规划算法.zip(matlab)路径规划...
为满足这一需求,本文提出了一种基于Carsim+Simulink联合仿真的变道技术,通过结合路径规划算法和MPC轨迹跟踪算法,实现了精准的变道操作。在本文提供的算法中,我们采用了XXX算法(自定义算法名称),该算法综合...
各类路径规划算法大全(一)
标签: 算法
目前路径规划存在的问题主要为,此外传统的路径规划算法需要在建立全局地图的基础上进行路径规划,,这种算法导致了感知和决策分离,难以应用到位置环境中,因此后来相关研究者将兴趣放到了智能算法的研究上。...
路径规划算法实战:全局使用a算法,局部采用dwa路径规划算法 完整代码可以直接运行
基于matlab仿真的puma560机械臂RRT路径规划算法
本文展示人驾驶决策规划算法中的漂移算法,包括漂移过弯、定点漂移、漂移侧方位停车,基于C++的easyX库实现。由于考虑到easyX库的显示方式,所以本算法的实现方式和现实中无人车算法有所不同,现实中无人车算法更加...

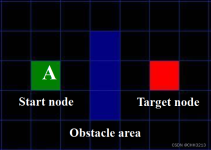
路径规划算法简介 1.涉及问题: 这里的路径规划是指如何寻找一条从给定起点到终点的路径,使机器人沿该路径移动的过程中不与障碍物发生碰撞且路程最短或移动代价最小。 2.简要介绍的算法: 1.遗传算法; 2.模拟退火...
《规划算法》目录: 第Ⅰ部分 介绍性的资料 第1章 绪论 1.1 从规划(的过程)到规划(的结果) 1.2 实例与应用 1.3 规划的基本组成 1.4 算法、规划器与规划 1.4.1 算法 1.4.2 规划器 1.4.3...
路径规划算法包括RRT算法和双向RRT算法,含有matlab ui界面。代码可直接运行。
基于遗传算法的路径规划算法代码
基于蚁群算法的路径规划算法代码
合集包括了模糊算法、遗传算法、A*算法MATLAB仿真,算法仿真可用。
五大常用算法——动态规划算法详解及经典例题,算法数据结构 五大常用算法
局部的优化:把这些环境信息模式视为下一次优化的窗口,并在此基础上,按照子目标点的实际情况和特定的优化对策,设计出下一次的最佳子总体目标,接着再依据子总体目标的环境信息模式,选用局部规划算法,先设定向子...
本人目前在研究基于离线式的全覆盖路径规划方法,资源里有一些智能算法,也有一些基本的扫描式、栅格法算法,仅供参考。
MATLAB 用基本蚁群算法进行二维路径规划,后面还有画图显示。
路径规划主要包含两个步骤:建立包含障碍区域与自由区域的环境地图,以及在环境地图中选择合适的路径搜索算法,快速实时地搜索可行驶路径。路径规划结果对车辆行驶起着导航作用。它引导车辆从当前位置行驶到达目标...
Theta* 是一种在计算机科学领域中用于解决路径规划问题的算法。它是A*算法的一个变种,用于在离散空间中寻找最短路径,其特点在于它可以找到更自然、更平滑的路径。论文链接:Theta*: Any-Angle Path Planning on ...
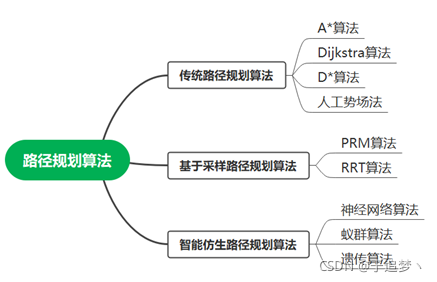
本文介绍了路径规划算法,包括传统路径规划算法和智能算法,传统算法与智能算法目前都有一定的优缺点和应用场景。目前来看,算法主要问题仍然在于算法收敛速度和容易陷入局部最优化等问题,针对各种算法, 许多学者...
NULL 博文链接:https://lvdccyb.iteye.com/blog/1328125
推荐文章
- NSFuzz:TowardsEfficient and State-Aware Network Service Fuzzing-程序员宅基地
- 刘睿民畅谈大数据:政府应紧急设立首席数据官-程序员宅基地
- nginx 编译安装依赖包_nginx编译怎么添加新的依赖库-程序员宅基地
- Python+OpenCV+Tesseract实现OCR字符识别_python + opencv + tesseract-程序员宅基地
- 微型计算机主板上的主要部件,微型计算机主板上安装的主要部件-程序员宅基地
- 推荐一款可匹敌国际大厂的国产企业级低无代码平台_国产私有化 无代码-程序员宅基地
- UE4 蓝图 实现 数组的边遍历边删除_ue4 数组删不掉-程序员宅基地
- python爬虫之bs4解析和xpath解析_from bs4 import beautifulsoup xpath-程序员宅基地
- MySQL配置环境变量-程序员宅基地
- VGG16进行微调,训练mnist数据集_vgg16 tensorflow 2 mnist-程序员宅基地