线性规划 1、所有线性规划问题化成matlab中规定的标准形式: f, x, b, beq, lb, ub为列向量,其中f为价值向量,b为资源向量,A,Aeq为矩阵。 2、linprog函数 上述对应Matlab中的求解命令为: [x,fval] = linprog...
”规划“ 的搜索结果
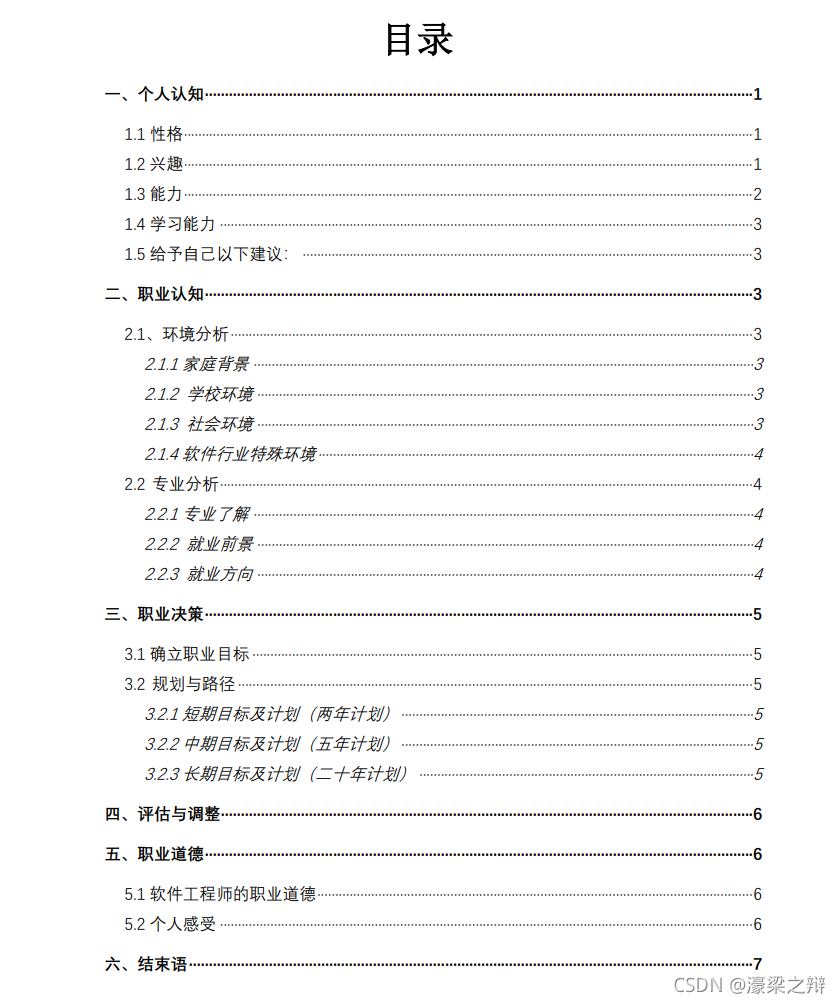
软件工程大学生职业规划书
标签: 个人开发
数学建模:线性规划与多目标规划
标签: 算法
目录单目标线性规划多目标线性规划理想解法线性加权法最大最小法目标规划法模糊数学解法 单目标线性规划 MATLAB中有一个专门求解线性规划问题的函数:linprog(),其使用方法如下: [x,fval]=linprog(c,A,b,Aeq,beq,...
全覆盖路径规划——ccpp
标签: 机器人
在路径规划方法中,有一种是点到点的路径规划,这一类例如dijstra,或者A*这类算法,关注的是点到点的最短路径,偏向一种最优的选择。还有一种是全覆盖是路径规划,这一类路径规划关注的是遍历整个地图,例如扫地...





动态规划学习笔记


最长公共子序列问题 动态规划


动态规划算法与典型例题
标签: c++
动态规划算法设计思路与一些典型例题,如长江游艇问题,0-1背包问题,跳台阶问题,强盗抢劫问题等

本文介绍了如何使用 MATLAB 中的蒙特卡洛方法来求解非线性整数规划问题。

一、运输规划涉及内容、 二、运输规划问题的数学模型、


本节内容是动态规划算法系列之一:动态规划的介绍,主要介绍了动态规划的定义,什么样的问题适合用动态规划算法去求解,最后说明动态规划算法在日常生活中的应用场景。 2. 什么是动态规划? 动态规划(Dynamic ...
算法-动态规划算法(详解)
标签: java
动态规划算法介绍 1)动态规划(Dynamic Programming)算法的核心思想是:将大问题划分为小问题进行解决,从而一步步获取最优解的处理算法 2)动态规划算法与分治算法类似,其基本思想也是将待求解问题分解成若干...
1.线性规划 求线性规划问题的最优解有两种方法,一种方法是使用linprog命令,另一种是使用optimtool工具箱,下面分别介绍这两种方法. ①linprog命令 一般情况下,Linprog命令的参数形式为[x,fval] = linprog(f,A,b,...
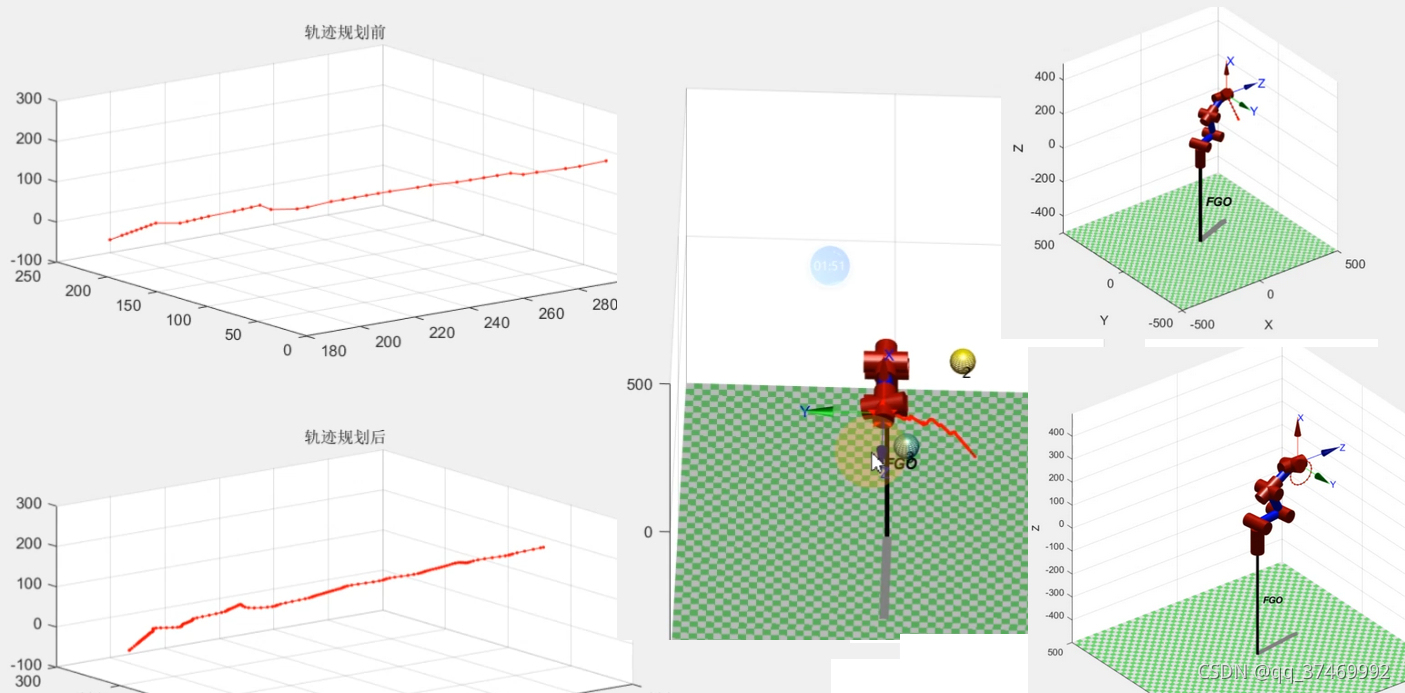
最近在研究无人机路径规划问题,整理了一些知识 路径规划实质:找到目标点 分为:全局和局部 一、路径规划的一些算法 1. RRT算法,即快速随机树算法(Rapid Random Tree),是LaValle在1998年首次提出的一种高效...

线性规划是数学规划中的一类最简单规划问题,常见的线性规划是一个有约束的,变量范围为有理数的线性规划。如: 对于这类线性规划问题,数学理论已经较为完善,可以有多种方法求解此类问题。但写这篇文章的目的并...
推荐文章
- 【Python】No module named ‘win32com‘,最简单的解决方法,适用windows、mac、linux_no module named 'win32com-程序员宅基地
- 有了这6款浏览器插件,浏览器居然“活了”?!媳妇儿直呼“大开眼界”_浏览器插件助手-程序员宅基地
- NumPy科学数学库_数学中常用的环境有numpy-程序员宅基地
- dind(docker in docker)学习-程序员宅基地
- com.sun.org.apache.xerces.internal.dom.DeferredTextImpl cannot be cast to org.w3c.dom.Element-程序员宅基地
- 计算机网络 (ISP、计算机网络体系结构 拓扑图)-程序员宅基地
- 集通字库芯片GT20L16S1Y 读取字体数据-程序员宅基地
- 关于ETH的NONCE_ethers获取交易nonce-程序员宅基地
- Flutter Widget显示隐藏_flutter判断控制是否被遮住-程序员宅基地
- 求助生物源排放模型MEGAN_megan v2.04-程序员宅基地