讲述机器人运动规划原理的经典书籍。 《规划算法》目录: 第Ⅰ部分 介绍性的资料 第1章 绪论 1.1 从规划(的过程)到规划(的结果) 1.2 实例与应用 1.3 规划的基本组成 1.4 算法、规划器与规划 ...
”规划“ 的搜索结果
【全覆盖路径规划】全覆盖路径规划代码

这篇毕业设计共计80页左右,主要是将强化学习应用于无人机路径规划,有需要的可以付费购买(毕竟内容很多,知识付费是有必要的)。同时,这篇论文的开源代码地址:...
城市规划毕业设计——环秀湖景观规划设计(毕业论文+答辩PPT).zip 城市规划毕业设计——环秀湖景观规划设计(毕业论文+答辩PPT).zip 城市规划毕业设计——环秀湖景观规划设计(毕业论文+答辩PPT).zip 城市规划...

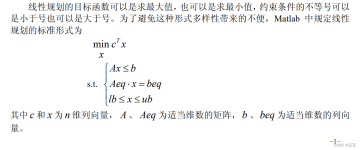
非线性规划是具有非线性约束条件或目标函数的数学规划,是运筹学的一个重要分支。非线性规划研究一个 n元实函数在一组等式或不等式的约束条件下的极值问题,且 目标函数和约束条件至少有一个是未知量的非线性函数。...


需要了解具体可私信,this project and code require a fee。其中涉及的算法和仿真平台一目了然,希望可以集合各位学习研究自动驾驶的小伙伴们一起交流。


我的大三的机器人控制原理课程设计及,利用机器人工具箱,进行六自由度的机械臂的直线轨迹规划和圆弧轨迹规划,完全可用,参数可改,有注释说明
本章介绍了低速非结构化场景中的多车协同决策规划,作者在此章节中介绍了多车协同决策规划的难点,并给出了一种解决方案。 1. 协同轨迹决策与序贯轨迹决策 多车协同轨迹决策问题规模会随着车队规模的增大而迅速增大...
在生产环境中,为了实现ThingsBoard PE专业版集群的高效部署,我们需要对CentOS操作系统、Linux内核、Docker容器技术、Rancher容器管理平台、Kubernetes容器编排系统以及ThingsBoard的版本进行周密的规划。这一规划...

线性规划课程实验基于Python实现的整数规划问题的求解项目源代码,含分支定界法、割平面法、匈牙利算法、蒙特卡洛法 ├── BranchAndBound 整数线性规划问题的分支定界法实现 ├── CuttingPlane 整数线性规划...
混合式课程 ...环境改造整体规划,依托目前现状,充分利用已有资源进行整体规划改造,使其符合信息化建设要求 系统建设持续发展,充分考虑与其他信息化系统对接机制和未来可持续发展规划,构建智慧校园环境
合集包括了模糊算法、遗传算法、A*算法MATLAB仿真,算法仿真可用。
点到点轨迹规划的S曲线,已知起始位置、终止位置、最大速度、最大加速度、总的运动时间、这5个参数,自动计算出运动规划曲线(若输入的参数不合适,代码可以自行计算出合适参数)
利用粒子群算法做水下机器人的路径规划,障碍物在此文件中设为圆形,并绘制出路径图和收敛曲线图

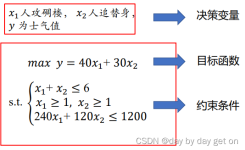
4.1 数学规划介绍 1、数学规划模型的定义 2、数学规划模型 2.1、企业生产计划 3、例1 加工奶制品的生产计划 3.1、整数规划(Integer Programming,简记IP) 4、0-1规划模型 选课策略 5、非线性规划模型 5.1、非线性...
推荐文章
- Codeforces-学校排队-程序员宅基地
- 计算机毕业设计ssm基于JAVA的图书馆自习室座位预约系统194fd9 (附源码)轻松不求人_基于ssm的图书馆预约座位-程序员宅基地
- 实值复变函数求导 ——(Wirtinger derivatives)_wirtinger导数-程序员宅基地
- VMWare虚拟机设置固定IP上网方法_vm虚拟机只允许指定ip访问-程序员宅基地
- 深度学习修炼(一)线性分类器 | 权值理解、支撑向量机损失、梯度下降算法通俗理解-程序员宅基地
- 基于SpringBoot的社区团购APP+02043(免费领源码)可做计算机毕业设计JAVA、PHP、爬虫、APP、小程序、C#、C++、python、数据可视化、大数据、全套文案-程序员宅基地
- 如何在无公网IP环境下远程访问Serv-U FTP服务器共享文件-程序员宅基地
- uniapp的navigateTo页面跳转参数传递问题_uni.navigateto刷新携带参数丢失-程序员宅基地
- C++中std::getline()函数的用法-程序员宅基地
- vue 工作中的一些小总结(基础知识供刚入门的小伙伴看 vue+elementUi+vsCode+vue-router+iconfont )_mac+elementui+vscode-程序员宅基地