
”自动驾驶技术之路径规划“ 的搜索结果

路径规划通常指全局的路径规划,也可以叫全局导航规划,从出发点到目标点之间的纯几何路径规划,无关时间序列,无关车辆动力学。 避障规划又叫局部路径规划,又可叫动态路径规划,也可以叫即时导航规划。主要是探测...
Dijkstra算法详解,另外还包含了自动驾驶学习资料的获取: 涵盖感知,规划和控制,ADAS,传感器; 1. apollo相关的技术教程和文档; 2.adas(高级辅助驾驶)算法设计(例如AEB,ACC,LKA等) 3.自动驾驶鼻祖mobileye的...
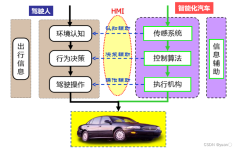
本文以自动驾驶汽车为研究对象,结合国家重点研发计划专项课题 “整车智 能化控制及性能提升技术” 的研究任务及前瞻性技术探索需要,重点开展自动驾 驶汽车局部路径规划与横向控制算法研究工作,提出并设计了一种基...
本文以障碍物场景下的自动驾驶车辆作为研究对象,为保证自动驾驶车辆的行驶安全性与操纵稳定性, 基千模型预测控制 (Model Predictive Control, MPC) 理论对自动驾驶技术中的局部避障路径规划与路径跟踪控制进行...

基于C++实现的自动驾驶常用路径规划算法源码(实际项目所用)+使用说明+代码注释.zip基于C++实现的自动驾驶常用路径规划算法源码(实际项目所用)+使用说明+代码注释.zip基于C++实现的自动驾驶常用路径规划算法源码(实际...
混合A *计划器州格规划师控制器纸规划推荐材料调查自动驾驶城市车辆运动计划和控制技术调查自动驾驶路径规划中的实用搜索技术 Frenet框架中动态街道场景的最优轨迹生成控制推荐材料纯追求路径跟踪算法的实现自主汽车...
轨迹规划是在考虑临时或移动障碍物的前提...再回答为什么有的论文没有路径规划,可能是因为是室内机器人,园区机器人等小型封闭空间内的运动规划,或者是其他缺少移动障碍物的场景,所以轨迹约等于路径,没有两者之分。
自动驾驶汽车路径规划技术.pdf
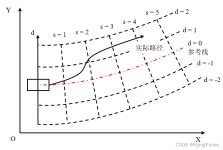
在自动驾驶技术的研究中,对自动驾驶车辆规划路径的轨迹跟踪问题是亟待解决并优化的重要课题,本文依据模型预测控制 (Model Predictive Control, MPC) 理论, 展开对自动驾驶车辆规划路径的轨迹跟踪 控制策略研究, ...


本文讨论了自动驾驶车辆的路径规划算法,如A*和Dijkstra,以及控制策略,如PID控制。本文将探讨自动驾驶车辆的路径规划算法,如A*和Dijkstra,以及控制策略,如PID控制。PID控制(比例-积分-微分控制)是一种经典的...


随着社会不断进步, 经济快速发展, 科学技术也在... 提出自动驾驶汽车下匯道路径优化控制策略, 运用计算机仿真手段, 确定其最优的下面道路径控制策略, 为面向自动驾驶汽车的高速公路管理与控制提供前瞻性研究基础
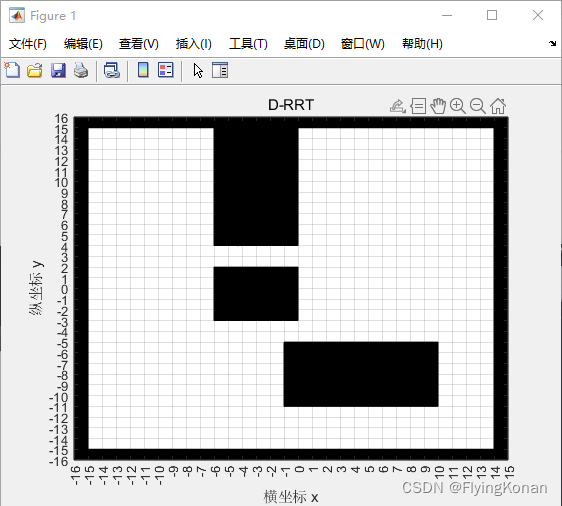
实时进行路径规划是车辆能够实现自动驾驶的重要功能之一,自动驾驶车辆面对的交通场景多而复杂,因此如何根据感知层得到的车辆周边的障碍物、车流、人流信息规划出一条安全、驾乘舒适、平滑的路径是自动驾驶领域的...
五种路径规划算法对比,另外还包含了自动驾驶学习资料的获取: 涵盖感知,规划和控制,ADAS,传感器; 1. apollo相关的技术教程和文档; 2.adas(高级辅助驾驶)算法设计(例如AEB,ACC,LKA等) 3.自动驾驶鼻祖...
整车控制策略,智能网联
自动驾驶技术是近年来以快速发展的人工智能领域中的一个热门话题。自动驾驶涉及到的技术包括计算机视觉、机器学习、深度学习、路径规划等多个领域的知识和技术。在这篇文章中,我们将关注自动驾驶中的车辆数字定位和...
路径规划是指在给定起点和终点的情况下,确定一条从起点到终点的最佳路径的过程。它是计算机科学、人工智能和自动化领域中的一个重要问题,...在自动驾驶领域中,路径规划可以帮助车辆避免碰撞障碍物,保证行驶安全。
需要了解具体可私信,this project and code require a fee。其中涉及的算法和仿真平台一目了然,希望可以集合各位学习研究自动驾驶的小伙伴们一起交流。

针对平直道路上碰撞交通事故的多发性和复杂性,借鉴人工势场理论思想,提出了一种基于危险斥力场的自动驾驶汽车主动避撞局部路径规划算法.该算法建立了算盘式道路和危险斥力场模型,根据算珠受到来自道路边界斥力、障碍...
推荐文章
- 用好ASP.NET 2.0的URL映射-程序员宅基地
- C语言等级考试是把题目删了,历年全国计算机的等级考试二级C语言上机考试地训练题目库及答案详解(72页)-原创力文档...-程序员宅基地
- Microsoft Office显示正在更新无法打开的问题_正在更新microsoft 365和office-程序员宅基地
- 非常好的Ansible入门教程(超简单)-程序员宅基地
- 【Gradle-8】Gradle插件开发指南-程序员宅基地
- 使用PL/SQL Developer软件解锁_plsqldev表格锁怎么打开-程序员宅基地
- 【Windows Server 2019】Web服务 IIS 配置与管理——配置 IIS 进阶版 Ⅳ_iis默认路径-程序员宅基地
- 网络中的各层协议_发送消息时各层协议-程序员宅基地
- UCRT: VC 2015 Universal CRT, by Microsoft_vc15rt-程序员宅基地
- 关于EntityFramework 7 开发学习_entiry framework 7 书籍-程序员宅基地