点击上方“3D视觉工坊”,选择“星标”干货第一时间送达学习3D视觉核心技术,扫描查看介绍,3天内无条件退款圈里有高质量教程资料、可答疑解惑、助你高效解...
”物体抓取位姿估計算法綜述“ 的搜索结果
本文摘自于:徐冠宇,董洪伟,钱军浩,许振雷....研究团队使用基于点对特征的点云匹配和位姿估计算法,针对工业环境中乱序物体的特点,进行了一系列改进,如场景点云法线方向一致性调整、抓取位姿筛选策...
使用基于点对特征的点云匹配和位姿估计算法,针对工业环境中乱序物体的特点,进行了一系列改进,如场景点云法线方向一致性调整、抓取位姿筛选策略调整、旋转对称引起的角度偏差调整,以取得更理想的位姿估计结果。...
6D Object Pose Estimation by Iterative Dense Fusion (CVPR2019)原文链接:https://arxiv.org/abs/1901.04780代码链接:https://github.com/j96w/DenseFusion主要思想:用于从RGB-D图像中估计一组已知对象的6D位姿,...
综述:深度域适应目标检测标题:Deep Domain Adaptive Object Detection: a Survey中科院自动化所:关于Domain Adaptive在目标检测上应用的综述,已经投稿至ICIP2020。作者:Wanyi Li, Peng Wang链接:...
该项目是关于六轴机械臂视觉抓取的任务,其中需要使用到物块的4D位姿估计。原理大概如下:基于深度相机Kinect v2采集点云数据,利用TensorFlow深度学习框架设计了基于PointNet改进的位姿估计算法,从而获得物块的4D...
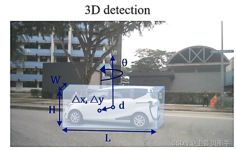
刚体6D姿态估计方法综述 1 问题描述 对于一个刚体,已有单个视角下的RGB-D数据,恢复相机坐标系下物体的6D位姿,即3D位置和3D姿态; 2 问题解析 这类问题通常需要已知物体的3D模型(点云或网格,纹理情况视...
如何理解物体的6D位姿估计任务?
标签: slam
首先,以物体中心或者质心为坐标原点,建立物体自身坐标系,记作坐标系1。由于是一个物体,那么这个物体上所有的点在这个坐标轴下,都会有一个...那么我们如何描述目标物体在坐标系2下的位姿呢? 我们通过图片中的物体
这些机器人能够 正常运作的关键就是机器视觉技术,它充当着机器人的“眼睛”,通过模拟人体,利用 视觉传感器系统去识别物体的颜色、纹理、位置等信息,然后将这些信息通过算法进 行处理从而实现对目标物体的识别、...
我们总结了基于视觉的机器人抓取过程中的三个关键任务,即物体定位、物体姿态估计和抓取估计。详细地说,对象定位任务包括无分类的对象定位、对象检测和对象实例分割。此任务提供输入数据中目标对象的区域。物体姿态...
一、分类 单目标跟踪 - 给定一个目标,追踪这个目标的位置。多目标跟踪 - 追踪多个目标的位置。 Person Re-ID - 行人重识别,是利用计算机视觉技术判断图像或者视频序列中是否存在特定行人的技术。...
机器人抓取检测技术的研究现状
标签: 机器人
首先,基于环境限制和机械手与物体模 型进行抓取检测,抓取检测是指找到满足与抓取任 务相关的一组候选抓取位姿的过程;在在线阶段,将场景进行分割,识别出物体,找 到物体模型数据库中的物体与之对应,然后进行物体 姿态...
作为第1步,检测物体并生成抓取位姿是成功抓取的前提,有助于后续抓取路径的规划和整个抓取动作的实现. 鉴于此,以检测为主进行文献综述,从分析法和经验法两大方面介绍抓取检测技术,从是否具有抓取物体先验知识的角度...


本课题立足机械手自主抓取,研究利用卷积神经网络实现物体表面抓取点生成的解决方案。本课题以场景的深度图像作为输入信息,采取 “先采样,后预测”的两步走抓取生成方案。首先利用 Laplace 方法在深度图像中提取...
当谈到视觉抓取(Visual Grasping)时,我们指的是机器通过视觉感知和控制来实现物体抓取的能力。这项技术在机器人领域中具有重要意义,因为它使机器人能够在复杂环境中执行各种任务,例如物体搬运、装配、仓储等。 ...
由于世界上的所有物体,我们都可以建立它的三维模型,即以物体中心点为坐标原点,建立一个三维坐标系,那么我们就能得到物体所有部位点在自身坐标系下的3D坐标值。由于物体是刚体,所以物体在自身坐标系下的3D坐标值...
但在实际应用中,一些外部环境因素和物体本身的因素对抓取检测的准确性都有影响。那里有许多抓取检测的分类方法。本文采用并联夹持器作为抓取末端进行研究。针对机器人抓取的角度问题,本文综述了从二维图像到三维...

Sora是一种文本到视频生成的人工智能模型,由OpenAI于2024年2月发布。该模型经过训练,能够从文本指令中生成逼真或想象的场景视频,并显示出在模拟物理世界方面的潜力。基于公开的技术报告和逆向工程,本文对该模型...
点击下方卡片,关注「3D视觉工坊」公众号选择星标,干货第一时间送达来源:3D视觉工坊添加小助理:dddvision,备注:点云检测,拉你入群。文末附行业细分群论文题目:ADVANCEMENTS IN POINT CLOUD-BASED 3D DEFECT ...
上海200050 2中国科学院大学,北京1000493雄安创新研究院,中国,4中国科学技术大学安徽合肥230027 5上海科技大学上海[email protected]摘要类别级6D物体位姿估计的目的是从已知类别中预
视觉伺服控制:视觉伺服,一般指的是,通过光学的装置和非接触的传感器自动地接收和处理一个真实物体的图像,通过图像反馈的信息,来...基于视觉的机器人抓取——从物体定位、物体姿态估计到平行抓取器抓取估计:综述。
推荐文章
- 利用playbook安装和卸载nginx_playbook 卸载nginx-程序员宅基地
- Leetcode--有效的括号-程序员宅基地
- 使用expdp工具导出数据库下的scott用户的相关信息,不导出表数据,只想导出相关的元数据(表和索引相关定义)-程序员宅基地
- 生成矩阵_生成经济距离空间权重矩阵的Stata代码-程序员宅基地
- oracle中如何创建/删除数据库的实例_oracle9i如何删除和创建实例-程序员宅基地
- java计算机毕业设计高校人事管理系统MyBatis+系统+LW文档+源码+调试部署-程序员宅基地
- Linux下实现蜜罐系统_硬件:局域网内联网的两台主机,其中一台linux操作系统主机安装“蜜罐”。另一台为w-程序员宅基地
- 洛谷 1073 最优贸易 NOIP2009T3 SPFA-程序员宅基地
- 【Centos 7】【Docker】 安装 kafka_centos kafka docker-程序员宅基地
- VulnHub-DRIFTINGBLUES: 3_nmap -sp ip/mask-程序员宅基地