”点云“ 的搜索结果

基于Point Pair Features(PPF)的6D姿态估计方法PPF是在机器视觉领域应用广泛的一种物体位姿提取方法。大名鼎鼎的Halcon,其Surface Matching 模块就是在这种方法的基础上做的优化。
点云基础介绍(一)——三维点云
标签: 计算机视觉
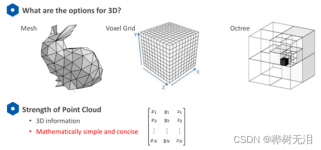
三维点云(3D Point Cloud)是一种用于表示三维空间中对象或场景的数据结构。在最基础的形式中,它是一个包含多个三维坐标点(X, Y, Z)的集合。这些点是通过对实际物体或场景表面进行离散采样而获得的,因此,点云...
【点云概述】什么是点云、来源、种类、特点、处理?点云(point cloud)是空间中点的数据集,可以表示三维形状或对象,通常由三维扫描仪获取。点云中每个点的位置都由一组笛卡尔坐标 ( X , Y , Z ) (X, Y, Z) (X,Y,Z...
Rabbit兔子点云模型
标签: PCL 点云
pcd+ply+xyz,Rabbit兔子点云模型
点云综述(整理自网络资源)
标签: 数码相机
3D点云基础知识 - 知乎点云是某个坐标系下的点的数据集。根据激光测量原理得到的点云,包括三维坐标(XYZ)和激光反射强度(Intensity),强度信息与目标的表面材质、粗糙度、入射角方向以及仪器的发射能量、激光...
PCL学习一:点云与PCL基础
PCL(Point Cloud Library)是一个常用的点云处理库,提供了许多点云处理的功能,其中包括点云归一化。 点云归一化是将点云数据转换为统一的坐标系,使得不同点云之间可以进行有效的比较和配准。点云归一化的意义...
本资源提供一种基于c#、PCL、c++框架开发的点云多视图显示系统demo,该系统属于一个基础开发框架。资源中提供了功能展示和配置说明。 本资源提供全套的开发源码(c#、c++)和一套可直接运行的多视角点云显示系统。 ...
点云统计滤波是一种基于统计学原理的点云数据滤波方法,可以有效地去除点云数据中的离群点和噪声。其基本思想是对点云中每一个点的邻域内的数据进行统计分析,然后根据一定的规则判断该点是否为离群点,从而实现点云...
1、该资源采用C++和PCL编写用于点云显示的DLL动态库,实现了点云显示与软件窗体的链接,属于开发点云软件中显示的必备功能。 2、本资源提供了C# 端、C++端dll开发的全部代码,可以在该框架上添加其他的软件功能...
用OpenTK做的点云浏览程序,使用八叉树管理点云数据,采用视景体切割和显示列表加速,打开常用的LAS格式点云
此代码用于将 LiDAR 点云投影到图像并生成带颜色的点云 输入 图像(.png 文件) 点云文件(.bin 文件) Calib 文件 支持两种 calib 文件类型。 所有参数存储在一个文件中。例如 KITTI R_rect: 形状 3*3 P_rect: ...
网上关于Halcon点云转成深度图的方法: get_image_size (GrayImage, Width, Height) gen_image_const (ImageConst, 'real', Width, Height) set_grayval (ImageConst, X, Y, Z) 首先要知道图像的宽度和高度,但是不...
他是一个c#插件,安装后,可以对界面进行渲染,当我们进行点云数据处理等大数据处理时候,可以安装他,可以在上面显示点云数据等功能。
unity点云绘制,点云数据绘制三维显示
斯坦福大学点云数据集 点云库学习必备
基于matlab点云工具箱对点云进行处理二:对点云进行欧式聚类,获得聚类后点云簇的外接矩形.rar
基于matlab平台,读取txt格式深度信息并显示点云
该程序对从Velodyne获取的点云数据建立栅格地图实现地面分割。
在MATLAB中读取和可视化PLY(Polygon File Format)格式的点云文件,使用MATLAB的Computer Vision Toolbox和PointCloud对象。确保已安装Computer Vision Toolbox. 在MATLAB的图形窗口中显示点云的可视化,可以旋转、...
平台:基于C#平台开发的点云窗体系统 系统功能包括:1、点云坐标提取; 2、定距显示; 3、点云图像显示(包括动态显示); 4、点云轮廓提取 解决内容:1、提供了解决C#窗体实现点云显示功能的解决方案(C#+DLL); 2、...
基于matlab点云工具箱对点云进行处理三:对点云进行欧式聚类,使用三角剖分处理后获取点云簇的外接凸多边形.rar
读取Las点云,读取点云的坐标等信息,进行点云的操作
直接运行TestMyCrust.m, 读取点云txt,或者直接加载mat文件 运行需要几分钟,耐心等待 完成后运行trianglenormal.m, 生成三角面片的法向量 运行完成得到tri.txt(组成三角面片的点的编号信息),trinormal.txt(每个...
CloudCompare是一个三维点云(网格)编辑和处理软件。最初,它被设计用来对稠密的三维点云进行直接比较。它依赖于一种特定的八叉树结构,在进行点云对比这类任务时具有出色的性能。此外,由于大多数点云都是由地面...
用MATLAB实现激光雷达的三维点云的重建。
通过建立点云数据的包围盒结构,对不同位置疏密不一致的点云进行抽稀和均匀化处理。
推荐文章
- com.netflix.discovery.shared.transport.TransportException: Cannot execute request on any known serve-程序员宅基地
- PAT乙级练习题1010 一元多项式求导_pat 乙级 1010-程序员宅基地
- You can also run `php --ini` inside terminal to see which files are used by PH P in CLI mode_you can also run `php --ini` in a terminal to see -程序员宅基地
- 对UDP校验和的理解_udp 数据包 校验和 checksum=0-程序员宅基地
- 递归遍历文件夹,以c:/windows为例-程序员宅基地
- git 本地与远程的链接_git如何本地和网页链接-程序员宅基地
- ArrayList与HashMap遍历删除元素,HashMap与ArrayList的clone体修改之间影响_在arraylist和hashmap遍历的同时删除元素,可能会导致一些问题发生-程序员宅基地
- Chapter2-软件构造过程和生命周期_iterative and agile systems development lifecycle -程序员宅基地
- 4.6 浮动定位方式float_c语言中float的左右浮动属性示例-程序员宅基地
- OSS上传【下载乱码问题】_阿里云oss文件名乱码-程序员宅基地