最近在学习slam时第一次遇到李群与李代数的概念,由于一开始不太理解,所以想通过这篇笔记来重新归纳梳理一下。1.李群的概念:李群是具有连续(光滑)性质的群;它既是群也是流行;直观上看,一个刚体能够连续的在...
”李群李代数“ 的搜索结果
群(Group)是一种集合加上一种运算的代数结构。把集合记作A,运算记作 · ,那么群可以记作G = (A,· ),群要求这个运算满足如下条件(封结幺逆——凤姐咬你): 封闭性:∀a1,a2 ∈ A, a1 ·a2 ∈ A. 结合律:...
Lie_theory _cheat_sheet.pdf李群理论公式表,方便查阅李群李代数等基本理论的公式

群是由一种集合+一种运算的代数结构。在实际工程中,我们需要评估一个算法的估计轨道和真实轨道的差异来评价算法的精度。将位姿估计转换成无约束优化问题,简化求解方式。具有连续(光滑)的群:SO(n)、SE(n)
基于旋量和李群李代数的SCARA工业机器人研究.pdf
... 在三维空间中刚体运动的基础上,假设机器人某时刻的位姿为T (也就是世界坐标系到机器人坐标系的变换矩阵为T),它观察到了世界坐标为p的点,产生了观测数据z,则由坐标变换关系,得z=Tp+w,其中w为随机噪声。...

SLAM基础——李群李代数
标签: 算法

袁治晴摘要:数据融合是提升...本文将对李群李代数应用于数据融合的算法进行分析,展开对基于李群李代数的扩展卡尔曼滤波系统模型的分析,并实验对比得出将李群李代数应用于数据融合算法在提升精度方面起着的重...
李代数有一个集合V\mathbb{V}V、一个数域F\mathbb{F}F和一个二元运算[,]组成,如果满足以下几条性质,则称(V\mathbb{V}VF\mathbb{F}F,[,])为一个李代数,记作g。1.封闭性∀XY∈VXY∈V∀XY∈VXY∈V2.双线性∀XYZ...
第三讲:李群与李代数.pptx
标签: SLAM
上一讲,我们介绍了三维世界中刚体运动的描述方式,包括旋转矩阵、旋转向量、欧 拉角、四元数等若干种方式。我们重点介绍了旋转的表示,但是在...由于读者可能还没有李群李代数的基本知 识,我们将从最基本的开始讲起。
记录了SO(3)和SE(3)的求导方式,从BCH公式近似到导数模型、扰动模型的建立。
文章目录参考文献slam十四讲内容概括 参考文献 【1】slam十四讲 【2】barfoot state estimation这本书 【3】Quaternion kinematics for the error-state Kalman filter 【4】预积分北航博士讲解 ...
李群李代数基础 本文档推导了表示二维空间和三维空间中转换的李群常用公式。 李群 一个拓扑群,它也是一个光滑流形,还有一些其它的良好性质。与每个李群相关的是其李代数,它是下文中我们将要讨论的一个向量空间。...

在SLAM中经常会用到李群李代数与四元数来表示旋转变换,这些数学公式往往需要推导来推导去,分分钟搞到头都大了。但在SLAM中往往用到其中那么几个固定的性质,所以是没有必要对这些数学基础作过多深入的研究,只需要...

针对日益复杂的机械系统,提出用李群李代数符号描述正向和反向递推动力学,研究其控制和仿真问题。运用李群李代数符号表示了伴随变换和伴随算子,基于树形拓扑结构系统,推导得到其递推动力学方法,讨论了其闭环系统和...
SLAM中为啥要用李群李代数?
标签: slam
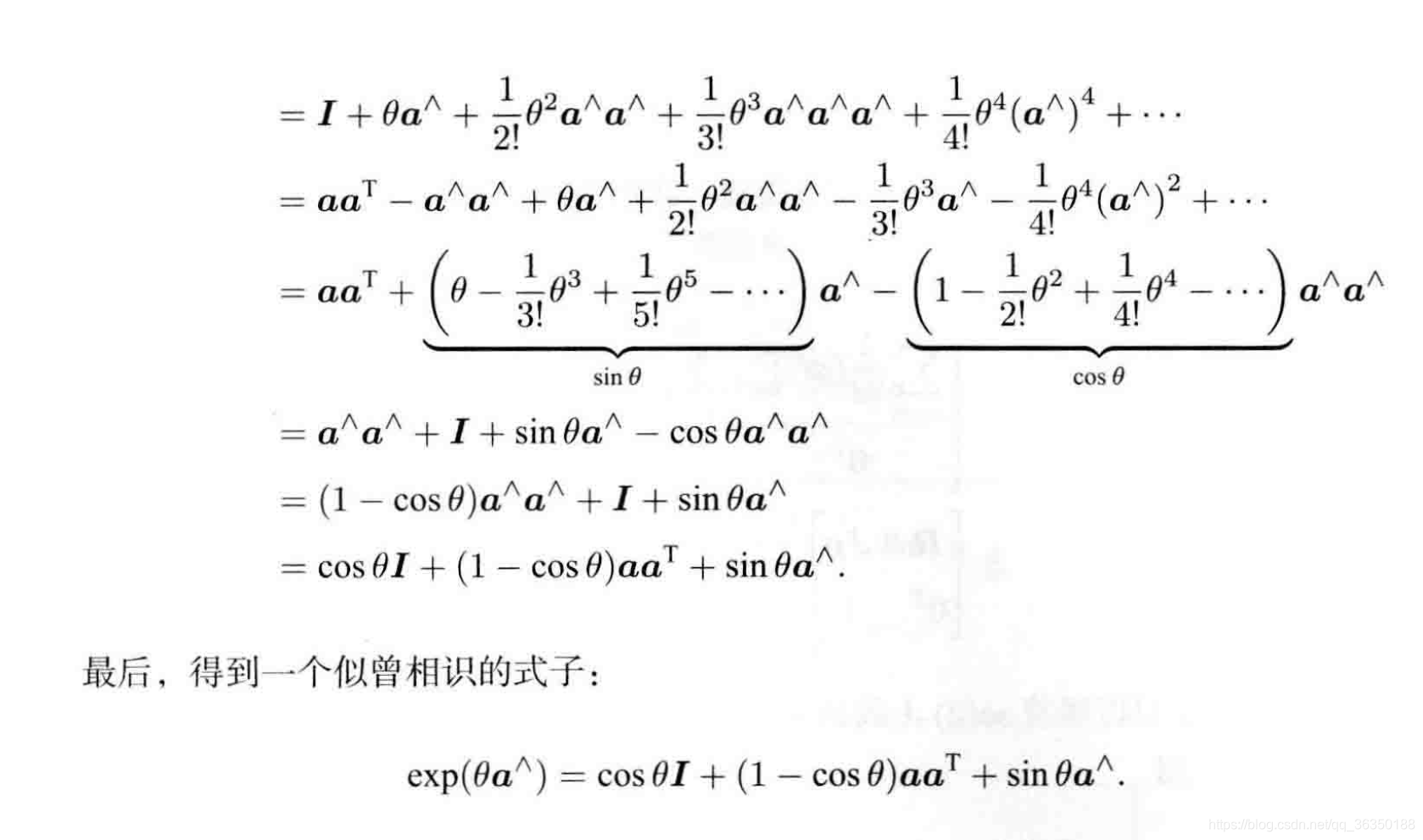
归根结底是要推出. 不要纠结于这个结果的中间过程, SLAM编程的时候直接用这个公式,基本上都没用过求李群李代数的Sophus

文章目录旋转的表示方式旋转向量旋转矩阵四元数三种方式之间转换旋转向量 ↔\leftrightarrow↔ 旋转矩阵旋转向量 ↔\leftrightarrow↔ 四元数旋转矩阵 ↔\leftrightarrow↔ 四元数李群李代数的性质指数与对数映射BCH...
目录概要李群李代数从实际应用了解Bundle Adjustment(BA)BA求解思路 概要 咸鱼了好久,为了个1024徽章还是上传点什么吧… SLAM知识点很多,李群李代数和BA优化是其中比较重要的点. 本文大部分内容来自<<视觉SLAM...
李群李代数转换关系 视觉SLAM14讲 第4讲 https://zhuanlan.zhihu.com/p/33156814 https://blog.csdn.net/heyijia0327/article/details/50446140 群 群(group)是一种集合加上一种运算的代数结构。把集合记...
对于任意的X,Y ,Z 属于 V ,[X,[Y,Z]] + [Z,[X,Y]]+ [Y,[Z,X]] = 0。结果可以看出并不是全0;只是一个反对称矩阵。但是如果你把每一项都仔细拆开,可以发现,每一项其实都为0。 matlab验证代码如下。
采用李群李代数符号描述了含主被动关节机器人的动力学分析和控制问题。首先用李群李代数描述了机器人的反向动力学,然后将牛顿一欧拉方法和铰接体惯量方法结合起来,给出了含主被动关节的机器人动力学解决方法。利用...
国外大学毕业设计,课程项目,自主项目,学习笔记等有用资源。

1.1 群 1.2 李代数 1.3 李代数的定义 1.4 李代数 1.5 李代数
推荐文章
- 大数据和云计算哪个更简单,易学,前景比较好?_大数据和云计算哪个好-程序员宅基地
- python操作剪贴板错误提示:pywintypes.error: (1418, 'GetClipboardData',线程没有打开的剪贴板)...-程序员宅基地
- IOS知识点大集合_ios /xmlib.framework/headers/xmmanager.h:66:32: ex-程序员宅基地
- Android Studio —— 界面切换_android studio 左右滑动切换页面-程序员宅基地
- 数据结构(3):java使用数组模拟堆栈-程序员宅基地
- Understand_6.5.1175::New Project Wizard_understand 6.5.1176-程序员宅基地
- 从零开始带你成为MySQL实战优化高手学习笔记(二) Innodb中Buffer Pool的相关知识_mysql_global_status_innodb_buffer_pool_reads-程序员宅基地
- 美化上传文件框(上传图片框)_文件上传框很丑-程序员宅基地
- js简单表格操作_"var str = '<table border=\"5px\"><tr><td>序号</td><-程序员宅基地
- Power BI销售数据分析_powerbi汇总销售人员业绩包括无销售记录的人-程序员宅基地