
”李群“ 的搜索结果
SE2(李群二维坐标系变换) 坐标系间的坐标变换公式 坐标系示意图 说明: 为世界坐标系,为子坐标系,为坐标系中一点,点在系中的坐标为,在系中的坐标为,为子坐标系原点在世界坐标系中的坐标,为子坐标系与...
最简单的李群-李代数的理解
标签: 拓扑学
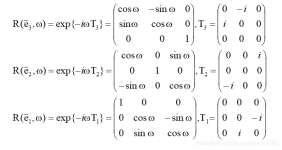
经过继续推导可以得到该旋转矩阵组成的李群对应的李代数(推到过程及其简单,求导分析即可)。而SO(3), SE(3)都是连续光滑的(可以想象,一个刚体可以在空间中连续地运> 动,对应的旋转矩阵和变换矩阵自然也是连续...


【SLAM】02_李群与李代数
标签: 笔记
SLAM中关于李群与李代数的数学基础,作为学习笔记。
很多刚刚接触SLAM的小伙伴在看到李群和李代数这部分的时候,都有点蒙蒙哒,感觉突然到了另外一个世界,很多都不自觉的跳过了,但是这里必须强调一点,这部分在后续SLAM的学习中其实是非常重要的基础,不信你看看大神...
李群与李代数
正交矩阵(旋转矩阵)求导
第四讲:李群和李代数 文章目录第四讲:李群和李代数1. 李群与李代数基础1.1. 群1.2. 李代数的引出1.3. 李代数的定义1.4. 李代数so(3)\frak{so}(3)so(3)1.5. 李代数se(3)\frak{se}(3)se(3)2. 指数与对数映射2.1. SO(3)...
李群,李代数的几何学心得总结
标签: 李群和李代数
上了研究生后听到师兄讲到李群、李代数,一脸的懵逼,他说“我面试搞无人机的如果不知道这个肯定不要”。于是乎,我在图书馆查询了相关书籍,可只有一些英文的书籍,借来一看更是懵逼。 随着研一的流转,渐渐的看到...


李群与李代数坐标系定义李群与李代数之间的关系那么如何对李代数的部分进行求导呢?为什么对于微小变量的求导等于直接对变量进行求导?求极限和求导的统一性?2. 图像处理基础知识3. 2D-2D 对极几何4. 2D-3D(PnP)...
前言 随手翻了下,这是《视觉slam十四讲》书里最理论的一章了,看完了觉得也挺有趣的!...李群是一种光滑连续的群,像(Z,+)就是李群。 李代数 旋转矩阵满足 对时间求导满足 这样矩阵R˙(t)R(t)T\dot{R}(t)R(t)^T
前言slam中一个关键问题之一就是求解相机的位姿,人们找了很多以相机位姿为变量的误差函数,比如光度误差,重投影误差,3D几何误差等等,希望使得误差最小,进而求得比较准确的相机位姿。举一个重投影例子: ...
高博SLAM十四讲书本程序学习——第4讲李群与李代数 在高博原始注释上,针对我自己不明白的部分,做额外注释 如果有错误的地方,请大家指点指点
但是我可以为您提供一些关于李群和李代数的基本信息。 李群(Lie group)是一种具有连续群结构和光滑流形结构的数学对象。它是由挠曲空间上的变换组成的,可以用来描述物理学中的对称性和对称变换。李群的一个重要...
Jordan 矩阵 用于判断两个矩阵是否相似。 判定两个矩阵是否相似不是件容易的事,即使他们有相同的特征多项式、迹和行列式,他们仍然可能不相似。那么我们的想法是:如果能将给定的两个矩阵A,B通过相似性转换成同一...

就像吉他中大横按的F和弦撑起了整个二手吉他市场一样,接下来的这一讲的李群李代数也同样葬送了很多初学者的学习之路。 在这一讲的解读中,我主要把重点放在如何把这一讲中的每个知识点...

本文转载自http://blog.csdn.net/heyijia0327/article/details/50446140,计算机视觉中的李群李代数问题,就属她讲的最清楚! 在多视角几何中,特别是在一些恢复相机运动轨迹的模型中,我们需要将相机的旋转和平移...
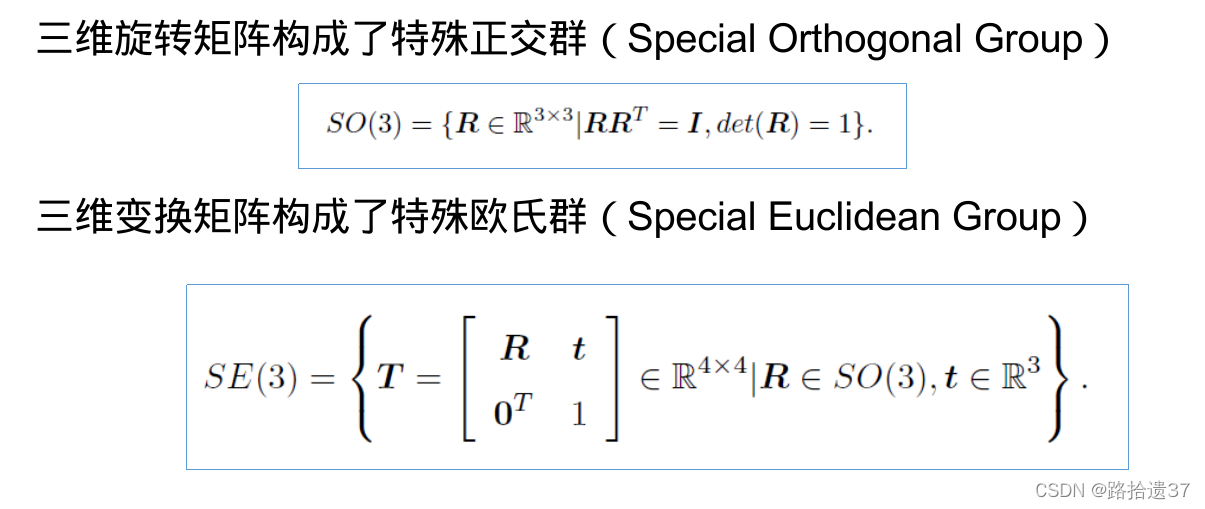
这时候需要使用矩阵李群的知识,将旋转或者变换等矩阵李群形式,映射到李代数上求解。本文主要涉及两个特殊矩阵李群:特殊正交群(special orthogonal group)SO(3),表示旋转;特殊欧几里得群(special Euclidean ...
参考: 1.... 2.Overcoming Singularity of Euler Angles in Robot Pose Estimation using Axis Rotation 3.Representing Attitude: Euler Angles, Uni...

大师兄!SLAM 为什么需要李群与李代数? (qq.com)
第一部分:SO(3)和so(3) 1、SO(3)对应的李代数 SO(3)对应的李代数是定义在上向量,我们记作。根据上一篇博客中的推导,可以知道,每个都可以生成一个反对称矩阵: 在此定义下,两个向量的李括号(运算)为: ...
推荐文章
- 第5节LMDeploy 大模型量化部署实践:笔记_llmdeploy-程序员宅基地
- 信号量~~_sem_t-程序员宅基地
- 如何用python爬取e-hentai的图片-程序员宅基地
- flutter屏幕适配-程序员宅基地
- 课程设计--计算机钢琴_计算机钢琴程序编写程序,程序运行时使 pc 机成为一架可弹奏的钢琴,当按下数字-程序员宅基地
- 用python动手学统计学_3-1使用python进行描述统计:单变量_num is deprecated and will be removed in python 3.-程序员宅基地
- JS之前台参数提交到后台,双引号转义为"解决办法-程序员宅基地
- vscode代码片段置顶_vscode置顶代码-程序员宅基地
- 百万级PHP网站架构工具箱,高并发架构方案_1000并发 架构php-程序员宅基地
- 数据结构中的C语言编程基础_编写数据结构的格式c语言-程序员宅基地