
”李代数“ 的搜索结果

因此此时如何求导就成了一个需要解决的问题,它们的李代数由向量组成,具有良好的加法运算,因此我们可以利用李代数来解决对位姿的求导问题。 上面看到了,因为上没有定义加法,所以我们不能求R的导数。但是我们...

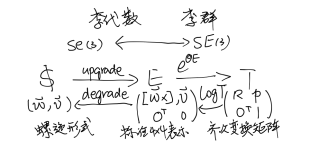
在知道了旋转矩阵、欧式变换的概念之后,我们学习李群李代数。 李群李代数是什么我也讲不清楚。但是在SLAM中,我们只用到两种李群和李代数 李群:SO3 SE3 李代数:so3 se3 SO3代表旋转矩阵,SE3代表欧式变换矩阵,...
1、 为什么要引出李代数? 因为在求解相机的状态估计是变换矩阵T是要被估计的量。 一般的思路寻优最小值的话就需要对T求导。变换矩阵不会求导,所以引入了李群和李代数,李代数对应李群的正切空间,它描述了...
视觉SLAM十四讲_4李群与李代数
标签: 算法

这篇博客主要是记录自己对李群、李代数的初步理解,还请大家一些讨论进步。 参考资料 lie group and computer vision : 李群、李代数在计算机视觉中的应用:这篇文章讲解的很好、很基础,非常适合啥也不懂的小白。很...
这一节,我们研究在SO(3)SO(3)SO(3)上两个矩阵相乘时其在so(3)so(3)so(3)上对应的李代数会如何变化。 为了便于讨论,我们将指数映射: R1R2=exp(ϕ1∧)exp(ϕ2∧)=exp(f(ϕ1∧,ϕ2∧)){{\rm{R}}_1}{{\rm{R}}_2...
李群李代数转换关系 视觉SLAM14讲 第4讲 https://zhuanlan.zhihu.com/p/33156814 https://blog.csdn.net/heyijia0327/article/details/50446140 群 群(group)是一种集合加上一种运算的代数结构。把集合记...
机器人开发机
文[1~7]中,讨论了点态...本文引进了点态化的Fuzzy李代数的概念.并对其子代数、理想、商代数、直和、同态基本定理、可解、幂零等一些最基本的问题进行了初步的探讨.关于点态化的Fuzzy李代数的深入研究,我们另文讨论.



1 李群与李代数的转换关系 本文主要对特殊正交矩阵SO(3) 和特殊欧式群SE(3) 以及其对应的李代数进行讨论。 1.1 已知条件 假设已知李群与李代数之间的指数映射关系: SO(3)和so(3) R=exp(ϕ∧)R = exp(\phi^{\wedge})R...
介绍了李代数交叉模的一个等价定义,用等价定义讨论了交叉模等价类之间的运算。对给定的李代数L,P及P-模M,考虑所有以M为核、以P为余核的交叉模的等价类集合,在等价类集中定义加法运算和数乘运算。证明了李代数的...
2、李代数是对加法封闭(因为其由向量组成)。 3、李代数对应李群的正切空间,它描述了李群局部的导数。 4、对于某个时刻的R(t)(李群空间),存在一个三维向量φ=(φ1,φ2,φ3)(李代数空间),用来描述R在t...

讨论了李代数G以及由这个李代数诱导的Leibniz代数G的一些性质,主要从不变双线性型和导子看这两个代数之间的差异,证明了在特定条件下两者的不变双线性型维数是一致的。为进一步确定李代数G和G的差异,讨论了由G诱导...
这一部分我把书中的内容认认真真的看了三遍,高博书中已经写的很详细了,不懂的地方去网上找找相关资料就没什么大问题了。 看完后要明白几个问题 ... 李群通过对数映射转化为李代数,反过来李代数通...
SLAM中为啥要用李群李代数?
标签: slam
归根结底是要推出. 不要纠结于这个结果的中间过程, SLAM编程的时候直接用这个公式,基本上都没用过求李群李代数的Sophus
在做vSLAM,使用到对旋转矩阵的求导,需要用到李群李代数知识,讲矩阵映射到李代数形式,方便求导,主要包含特殊正交群SO(3),特殊欧几里得群SE(3),表示位姿。旋转矩阵是特殊正交群,而变换矩阵是特殊欧氏群。旋转...
很多刚刚接触SLAM的小伙伴在看到李群和李代数这部分的时候,都有点蒙蒙哒,感觉突然到了另外一个世界,很多都不自觉的跳过了,但是这里必须强调一点,这部分在后续SLAM的学习中其实是非常重要的...
概念:3.1李群3.2李代数的引出3.3李代数: 视觉SLAM第四讲笔记 一.符号说明 R˙\dot{R}R˙ :矩阵R的一阶导数 ^\hat{}^ : 将一个向量变为反对称矩阵, ˇ\check{}ˇ : 将一个反对称矩阵变为向量 a^=A=(0−a3...

对视觉slam十四讲李群和李代数一章程序的学习,参考链接如下: https://www.icxbk.com/article/detail/1313.html(最后的代码写的很好,相比于书中代码调试的更全,推荐)。 Sophus库编程基础 - 掘金 Sophus 李群...
颜色运动学对偶性表明,杨米尔斯(YM)理论具有一些隐藏的李代数结构。 到目前为止,除了在自我对偶领域中取得一些进展外,这种结构还阻碍了人们的理解。 我们证明YM Feynman规则背后确实存在一个Lie代数。 我们发现...

推荐文章
- Android RIL框架分析-程序员宅基地
- Python编程基础:第六节 math包的基础使用Math Functions_ps math function-程序员宅基地
- canal异常 Could not find first log file name in binary log index file_canal could not find first log file name in binary-程序员宅基地
- 【练习】生成10个1到20之间的不重复的随机数并降序输出-程序员宅基地
- linux系统扩展名大全,Linux系统文件扩展名学习-程序员宅基地
- WPF TabControl 滚动选项卡_wpf 使用tabcontrol如何给切换的页面增加滚动条-程序员宅基地
- Apache Jmeter常用插件下载及安装及软硬件性能指标_jmeter插件下载-程序员宅基地
- SpringBoot 2.X整合Mybatis_springboot2.1.5整合mybatis不需要配置mapper-locations-程序员宅基地
- ios刷android8.0,颤抖吧 iOS, Android 8.0正式发布!-程序员宅基地
- 【halcon】C# halcon 内存暴增_halcon 读二维码占内存-程序员宅基地