文章总结了无人机飞行建模的工作流和方法,详细介绍了从无人机拍摄准备到建模导出的全流程。
”无人机拍摄“ 的搜索结果
计算机视觉数据集
这种无人机通常具有高清摄像设备、图像传输设备、GPS定位系统、智能控制系统等,可以轻松实现各种拍摄角度和高度,广泛应用于影视制作、旅游景区航拍、城市规划、环保监测等领域。价格昂贵、会修理无人机的人很少。
无人机乘船拍摄的4条实用经验 干货.docx
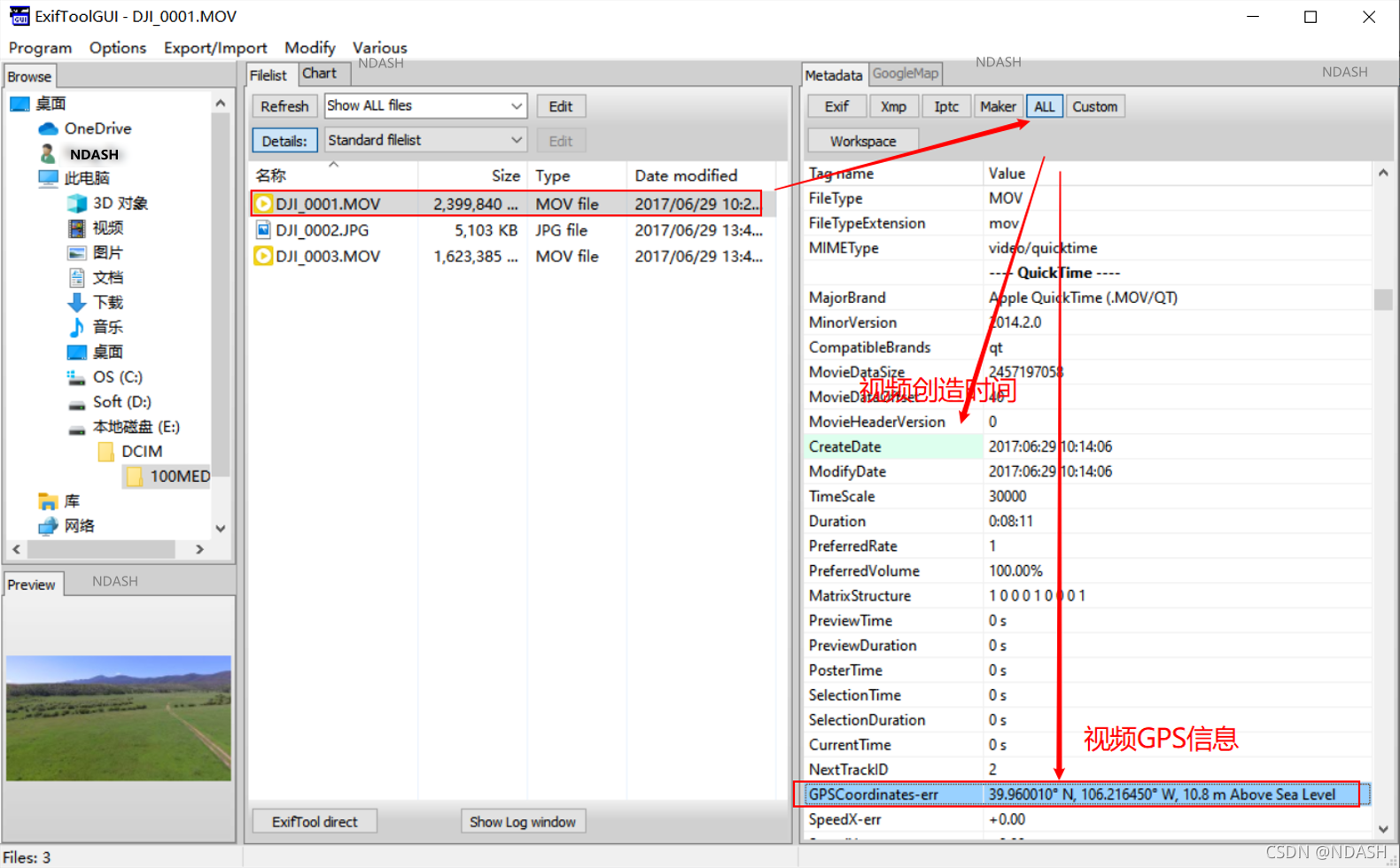
无人机,实时高度,ffmep,字幕
本文将详细探讨无人机避障技术在不同领域的应用,包括无人机快递与物流、灾害现场侦察、农业无人机应用、城市交通管理、建筑施工监控、环境保护与监测、娱乐与航拍应用以及军事侦察与防御。基于机器学习的无人机避障...

对于无人机拍摄行人和车辆的视频,我可以给您一些建议。首先,确保您在拍摄过程中遵守当地的法律和规定。以下是一些技巧: 1. 安全考虑:在拍摄行人和车辆时,确保无人机操作安全,不要干扰交通或危及他人安全。...
无人机拍摄的行人车数据集xml是一种有效的数据采集方式,它可以利用高空俯瞰的视角,快速获取大量的行人车流动情况,为交通安全、城市规划等领域提供有益的信息。该数据集xml可用于建立智能交通管理系统、交通预测...
三维工厂3DMaker是一款国内团队开发的三维模型浏览、分析、轻量化、几何校正、格式转换、调色裁切等功能专业处理软件。可以进行三维模型的网格简化、纹理压缩、层级优化等操作,从而实现三维模型轻量化。...
如果您想要使用无人机拍摄的素材来进行古村落漫游系统的建模,需要注意以下几点要求: 1. 拍摄画质:为了保证建模的精度和真实度,建议您使用高画质的相机或无人机进行拍摄,例如4K或以上的分辨率。 2. 拍摄角度:...
三维重建-使用Nerf开发的基于无人机航拍场景、手机拍摄的物体进行三维重建项目
## 1.1 无人机技术发展背景 近年来,随着科技的高速发展,无人机技术已经成为炙手可热的领域。无人机作为一种能够独立飞行的飞行器,具有着广泛的应用前景。起初,无人机主要用于军事侦察和攻击,但随着技术的进步...
无人及行人检测数据集,包括已经标注好的xml文件和txt文件,数据集包含训练集测试集和验证集,下载解压后即可使用。
以下是一个简单的C++代码,用于计算无人机拍摄图片的经纬度: ```c++ #include #include using namespace std; const double pi = 3.14159265358979323846; const double earth_radius = 6371000; // 地球半径...
8.5空间位置定位低(使用的是位姿信息进行视频定位,不需要像传统航测一样进行匹配特征点计算,定位精度就受到限制,镜头参数、位姿参数、无人机定位和地形的精度以及飞行高度和云台俯仰角等多种因素都会影响最终...
如果没有这个条件,将无人机放入原装的包装内,再放置于干燥环境中也是可以的,最不可取的就是将不用的机器不做防护,直接放置在架子上,用不了多久飞机就会被灰尘吞噬。在运输电池时,需要注意避免电池的碰撞,电池...
3. 便携性:无人机拍摄的红外图像可以通过移动设备或电脑进行观测和分析,具有便携性和实时性。 4. 多功能性:红外图像可以用于多种领域的应用,如医学、环境、军事、建筑等。 缺点: 1. 成本较高:红外成像技术的...
无人机拍摄的红外图像通常具有以下特点: 1. 可以实现夜间或低光环境下的拍摄,具有较高的适应性和灵活性。 2. 可以探测目标的热量分布和温度变化,具有较高的识别性和探测能力。 3. 可以通过不同的滤波器选择...
无人机在多个领域的广泛应用,为民生、科研、商业等众多行业带来极大的便利,平时看到一个人操控无人机去完成工作,看似简单,无人机能够完成这些工作,主要包含了飞控系统、云台+相机、无线图传系统三大部分,尤其...
我要训练的模型是无人机拍摄下的车,但由于标注工作量太大,所以先在网上找有没有现成的标注好的数据集试试看能不能训练出我想要的模型
PC连接上tello edu并通过python进行简单控制
三七出品--自制国内无人机航拍视角下车辆检测数据集
问题遇到的现象和发生背景 SAR三维成像 遇到的现象和发生背景,请写出第一个错误信息 用代码块功能插入代码,请勿粘贴截图。 不用代码块回答率下降 50% 运行结果及详细报错内容 我的解答思路和尝试过的方法,不写...
基于深度学习的无人机航拍车辆检测.pdf
在这个函数中,我们首先根据无人机的飞行高度和拍摄图片的视角计算出一个像素对应的经度和纬度差值,然后根据像素点的坐标计算出像素点的经纬度。在`main`函数中,我们可以使用`calcLatLon`函数来计算任意一个像素点...
无人机航测拍摄分类和注意事项
标签: 无人机

法1:我们可以使用photo...由我们的飞行高度为H,带入可以得到GSD为 xx cm/像素,再换算成m/像素,这里指一个像素代表实际长度为多少米,我们可以将这个结果平方,得到一个像素代表的实际面积B(这里的单位是平方米)。
推荐文章
- 【解决报错】java.sql.SQLException: Access denied for user 'root'@'localhost' (using password: YES)-程序员宅基地
- echart y轴显示小数或整数_echarts y轴显示16位小数-程序员宅基地
- Android客户端和Internet的交互_android与internet-程序员宅基地
- linux新建分区步骤_linux创建基本分区的步骤-程序员宅基地
- 信号处理-小波变换4-DWT离散小波变换概念及离散小波变换实现滤波_dwt离散小波变换进行滤波-程序员宅基地
- Ubuntu 10.10中成功安装ns-allinone-2.34_进入/home/ubuntu1/ns-allinone-2.34目录cd /home/ubuntu1-程序员宅基地
- 使用AES算法对字符串进行加解密_java 判断aes加密 与否-程序员宅基地
- DFS深度优先搜索(前序、中序、后序遍历)非递归标准模板_深度优先搜索 无递归-程序员宅基地
- 程序员面试字节跳动,被怼了~_字节跳动java什么技术站-程序员宅基地
- 嵌入式软考备考(五)安全性基础知识-程序员宅基地