
”建图“ 的搜索结果
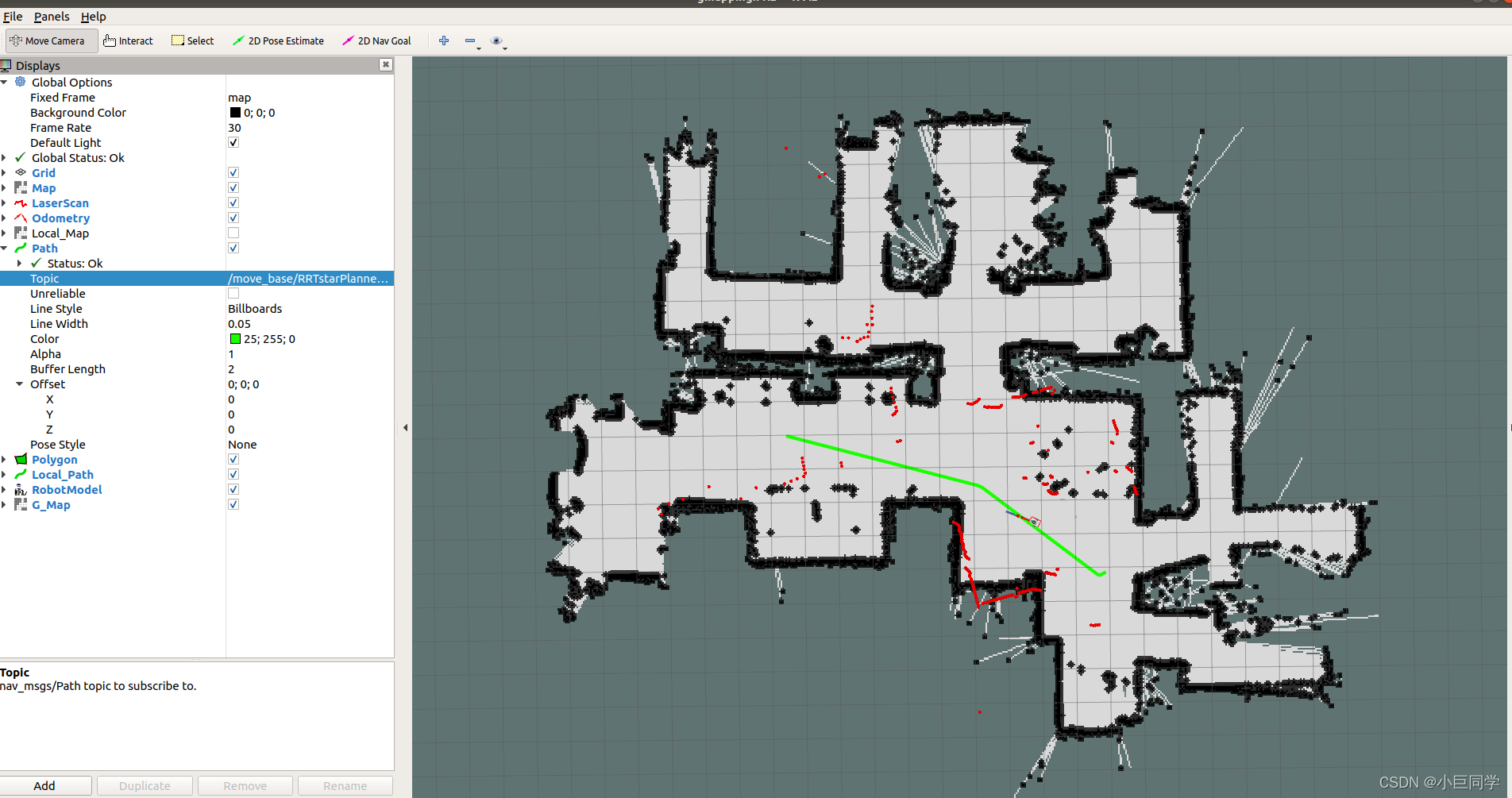
ROS+YOLOV8+SLAM智能小车导航实战(四、激光雷达+SLAM建图)

Turtlebot2 + RplidarA2(二)Cartographer手动建图1. 前文链接:Turtlebot2 + RplidarA2(一)Gmapping手动建图 1.


ROS机器人SLAM建图四种常用算法对比
基于ROS的 激光雷达+小车+IMU 的 SLAM建图定位路径规划源码+详细说明.zip


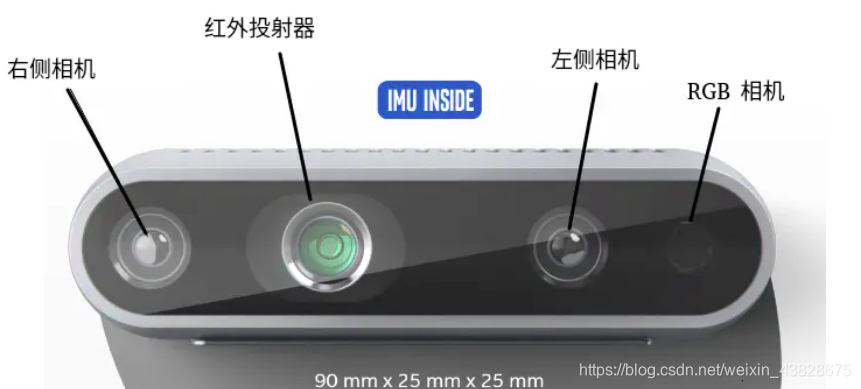
移动机器人使用RGBD建图1
7.2.5 导航与SLAM建图 添加链接描述 场景:在 7.2.1 导航实现01_SLAM建图中,我们是通过键盘控制机器人移动实现建图的,而后续又介绍了机器人的自主移动实现,那么可不可以将二者结合,实现机器人自主移动的SLAM建图...

内容摘要:当代移动机器技术的发展已经推动了系列相关技术的进步。其中就包括语义建图,它能提供对空间的抽象和机交流的段。最近语义建图的各种引和发展催了这篇章,中对现
速腾激光雷达 RS M1 slam 建图。
SLAM_使用OpenCV+Numpy进行定位+建图_视觉SLAM_优质项目实战


本章着重讲如何在ROS里面使用SLAM功能包,而不会去讲解算法;之后会专门的专栏做SLAM。 文章目录1. SLAM原理简介2. ROS机器人配置与数据结构①单线雷达②里程计3.... 1. SLAM原理简介 放几张GIF动图感受一下: ...



【代码】使用2D雷达laser+imu实现cartographer实时建图。


我们知道线段树是维护区间问题的神器 在图论中如果我们碰到区间建边问题: ①将某点与[L,R]区间点连权值w的有向边 常规做法是 for(int i=l;i<=r;i++)add(x,i,w); 情况时间复杂度为O(n) ...在我们建图时head[N
推荐文章
- 机器学习之超参数优化 - 网格优化方法(随机网格搜索)_网格搜索参数优化-程序员宅基地
- Lumina网络进入SDN市场-程序员宅基地
- python引用传递的区别_php传值引用的区别-程序员宅基地
- 《TCP/IP详解 卷2》 笔记: 简介_tcpip详解卷二有必要看吗-程序员宅基地
- 饺子播放器Jzvd使用过程中遇到的问题汇总-程序员宅基地
- python- flask current_app详解,与 current_app._get_current_object()的区别以及异步发送邮件实例-程序员宅基地
- 堪比ps的mac修图软件 Pixelmator Pro 2.0.6中文版 支持Silicon M1_pixelmator堆栈-程序员宅基地
- 「USACO2015」 最大流 - 树上差分_usaco 差分-程序员宅基地
- Leetcode #315: 计算右侧小于当前元素的个数_找元素右边比他小的数字-程序员宅基地
- HTTP图解读书笔记(第六章 HTTP首部)响应首部字段_web响应的首部内容-程序员宅基地