”姿态解算“ 的搜索结果
采用Mahony算法对IMU(+三轴磁力计)输出进行姿态解算,注释完整清晰。
四元数AHRS姿态解算和IMU姿态解算分析
姿态解算-陀螺仪+欧拉法
MPU6050是我们常用的六轴空间位置处理芯片,次文档使用卡尔曼滤波的方式使数据更加的准确
基于卡尔曼滤波器的姿态解算的代码实现及效果展示
本文汇总了常用的姿态解算算法,分别从姿态的3种微分方程出发构建运动方程,结合观测方程实现姿态的最优估计.
会参考已有较多的博客、b站视频、学术论文,主要给大家罗列一个学习清单,节省时间,快速入门姿态解算算法。由于本人电控专业,后续一些解释会与其结合,只谈自己的理解,希望大家多包涵。先来说明一下,我们要知道...
MPU6050传感器的六轴姿态解算算法代码
STM32解算MPU6050工程文件,IIC读取6050数据,带DMP 。
尽管滤波器估计出的姿态中方位角是发散的,我们仍然可以取初始化时的方位角为0,这样滤波器估计出的方位角就是相对初始时的方位,在短时间内它仍是可信赖的信息。阵,由于初始方位角被设定为0,它是我们极其确定的一...
浅谈基于卡尔曼滤波器的姿态解算推导过程和结论公式


MPU6050陀螺仪与姿态解算实验,使用hawk2平台
CSDN海神之光上传的代码均可运行,亲测可用,直接替换数据即可,适合小白; 1、代码压缩包内容 主函数:main.m; 调用函数:其他m文件;无需运行 运行结果效果图; 2、代码运行版本 ...若运行有误,根据提示修改;...
博客4中给出的滤波器状态维数为4维,测量量为3维,每次滤波需要做不少矩阵...这样一来状态和测量方程都变得十分简单,计算量也大大减小,应用在51这样的单片机上也能在10ms内完成姿态解算。对于测量方程,也可简化为。
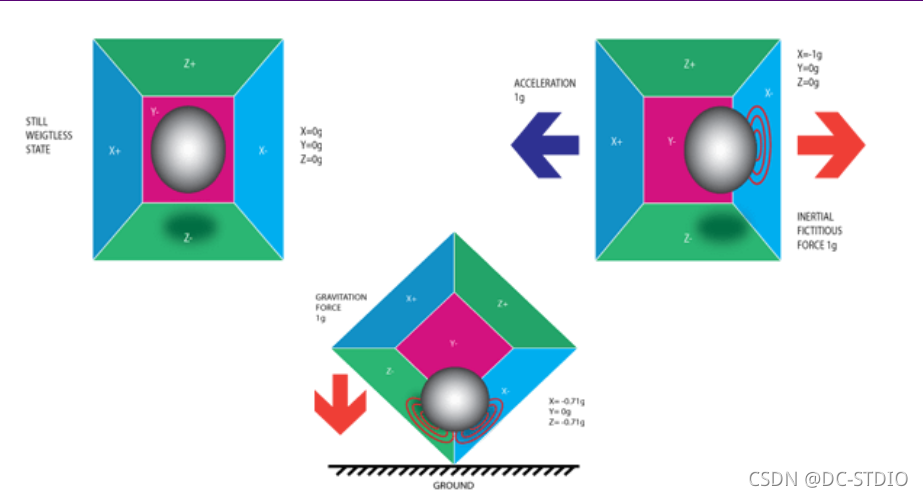
姿态解算也叫做姿态分析,姿态估计,姿态融合。姿态解算是根据IMU(惯性测量单元)数据(陀螺仪、加速度计、罗盘等)求解出飞行器的空中姿态,所以也叫做IMU数据融合。 ** 一、姿态解算常用名词解释 ** 1.坐标系 导航...
http://www.crazepony.com/wiki/attitude-algorithm.html
惯性导航姿态解算,附带程序详解,内容完全可以直接使用
基于stm32f103c8t6的姿态解算源码,icm和imu系列均可稳定使用
航路规划是指为移动机器人(如无人机)在给定环境中确定一条从起点到终点的有效路径的过程,该路径应满足特定约束(如避开障碍物、遵循飞行限制、最小化飞行成本等),确保机器人能够在预定时间内安全、高效地到达...
欧拉角是一种常用的空间旋转参数表示法,通过三个互不干涉的旋转角(一般为偏航角、俯仰角、翻滚角)来描述一个刚体相对于固定参考系的三维旋转。欧拉角直观易懂,适用于许多工程应用,但在连续旋转时可能出现万向锁...
Arduino uno + mpu6050 陀螺仪 运用卡尔曼滤波姿态解算源代码(总共4套程序)全部编译通过没有问题
九轴传感器姿态解算方法(MATLAB)
无人机技术作为现代科技与工业领域的重要创新成果,其影响力已渗透到众多行业,展现出广阔的应用前景和显著的社会经济效益。无人机在农业植保、地理测绘、应急救援、物流配送、影视拍摄、环境监测、国防军事等领域均...
扩展卡尔曼滤波 进行姿态解算的matlab代码,含九轴原始数据、方向传感器数据,可直接运行
MPU6500读取与卡尔曼滤波,mpu6050卡尔曼滤波姿态解算,C,C++源码.zip
四元数是简单的超复数。 复数是由实数加上虚数单位 i 组成,其中i^2 = -1。 相似地,四元数都是由实数加上三个虚数单位 i、j、k 组成,而且它们有如下的关系: i^2 = j^2 = k^2 = -1, i^0 = j^0 = k^0 = 1 , 每个...
推荐文章
- ps play服务器没有响应mac,【攻略技巧】人在外心在家 教你用PC/MAC远程打PS4-程序员宅基地
- PHP实现在数据库百万条数据中随机获取几条记录的方法_海量数据随机查询-程序员宅基地
- 基于CC2530的停车场系统_基于cc2530课程设计项目免费-程序员宅基地
- oracle求非偶非素数的和,每个大于的2偶数都是2个素数之和,(无素数定理)-程序员宅基地
- 有了它们,我把所有截图、录 GIF、录屏软件都卸了-程序员宅基地
- 170402网摘题目-程序员宅基地
- 安装paddlespeech报错ERROR: Could not build wheels for webrtcvad_could not build wheels for webrtcvad, which is req-程序员宅基地
- C# 将多个图片合并成TIFF文件的两种方法-程序员宅基地
- 基于springboot+vue.js的中山社区医疗综合服务平台附带文章和源代码设计说明文档ppt-程序员宅基地
- 【代码超详解 · 附参考模板】洛谷 P1226 【模板】快速幂||取余运算_洛谷批改代码系统如何实现-程序员宅基地