”多传感器融合定位学习“ 的搜索结果

瑞士苏黎世大学Stephen Weiss对基于EFK松耦合传感器融合定位研究非常深入,以下是他的相关论文和开源代码,可以详细阅读,最近并附上了本人阅读的相关博客。 1.论文 [1] Vision Based Navigation for Micro ...


转自知乎网友:多传感器融合(算法)综述 - 知乎 多传感器融合(Multi-sensor Fusion, MSF)是利用计算机技术,将来自多传感器或多源的信息和数据以一定的准则进行自动分析和综合,以完成所需的决策和估计而进行...
-采用gps、里程计和电子罗盘作为定位传感器,EKF作为多传感器的融合算法,最终输出目标的滤波位置。 本文采用的方法是利用iphone手机上的GPS来获取载体的经纬度,利用电子罗盘获取到航向角,通过加速度计积分得到...
多传感器信息融合分为集中式融合结构,分散式融合结构和分级融合结构。 随着机器人技术的不断发展,机器人的应用领域和功能有了极大的拓展和提高。智能化已成为机器人技术的发展趋势,而传感器技术则是实现机器人...
#资源达人分享计划#
激光SLAM之多传感器融合定位 , 工程化落地项目,涉及激光雷达+imu等多传感器融合定位,不仅仅是算法逻辑,里面还增加了工程应用角度的代码优化,配置解析文档也非常完整。该项目价格会比其他项目高的原因主要是在于...
多传感器融合track fusion
文章目录 1. 引言 2. 多传感器标定 2.1 标定场地 2.2 相机到相机 2.2 相机到多线激光雷达标定 2.3 相机到毫米波雷达标定 2.4 相机到IMU标定 ... 4.2 传统之多传感器定位 4.3 深度学习之障...

#资源达人分享计划#
基于多传感器融合的移动机器人SLAM算法研究
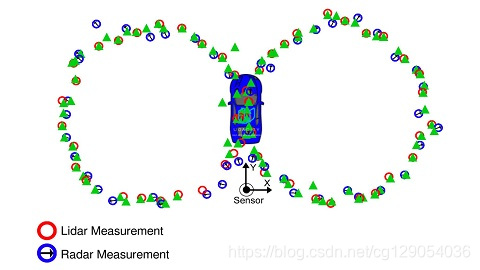
1、传感器(Sensor)选取自动驾驶系统中用于状态估计(State Estimation)的常用传感器包括GPS/GNSS、IMU、激光雷达(Lidar)。状态估计(State Estimation)选用传感器需要考虑哪些因素:1)误差不相关性。也就是说,用于...
在实际应用中,各个传感器的相对时间误差是未知的,这些误差可能是由于各个传感器的预处理耗时不同导致的,也可能是由于各个传感器的计时器精度不同造成的。1)从传感器制造商的使用说明书中获取。
软同步 时间同步包括两个步骤: 首先保证时钟源是一致的 因为时钟源都有钟漂,而且每个时钟源钟漂不同,所以即使把各个传感器时间戳在初始时刻对齐...而且GNSS信号能够达到定位要求时,自身时钟也会受到卫星上原子钟的

由于单一传感器获得的信息非常有限,而且,还要受到自身品质和性能的影响,因此,智能机器人通常配有数量众多的不同类型的传感器,以满足探测和数据采集的需要。若对各传感器采集的信息进行单独、孤立地处理,不仅会...
作者|Sky Shaw 编辑|汽车人原文链接:https://zhuanlan.zhihu.com/p/569124652点击下方卡片,关注“自动驾驶之心”公众号ADAS巨卷干货,即可获取点击进入→自动驾驶之心【多传感器融合】技术交流群后台回复【多...



多传感器融合研究(三)前言论文研究四:牛津大学自动驾驶数据集 前言 过去几个月找工作,有段时间没有推进传感器融合方面的研究了,最近工作基本已经定下来了,可以继续研究推进下研究。 论文研究四:牛津大学...
传感器融合带来多重好处 Sensor fusion brings multiple benefits ADAS(特别是与汽车传感器的发展趋势相吻合的汽车自动驾驶系统)。这个概念本身并不新鲜;在Google Scholar上搜索,可以找到可以追溯到20世纪60年代...
多传感器融合定位中最常用的一种传感器就是IMU,本节主要结合自己的学习和理解对IMU常用的知识点进行归纳总结,文中所提如有不足之处,还请各位批评指正。


推荐文章
- echarts的legend——图例样式的配置_echarts legend-程序员宅基地
- 数仓维度建模之维度表设计(设计实操二)_维度建模设计和实施过程-程序员宅基地
- 修改表字段长度sql-程序员宅基地
- Unity零基础到入门 ️| 游戏引擎 Unity 从0到1的 系统学习 路线【全面总结-建议收藏】!_unity学习路线-程序员宅基地
- 计算机缺少codex64.dll,win10x64缺少dll依赖库致使程序无法运行-程序员宅基地
- Android学习笔记_76_Android ProgressBar 进度条-程序员宅基地
- Android:高仿百度外卖、美团、淘点点二级联动效果!_android 仿美团左右联动页面-程序员宅基地
- 基于Python代码画柱状图(附全部代码)_python绘制柱形图代码-程序员宅基地
- ubuntu20.04安装Apollo Cyber RT及问题记录_ubuntu20.04安装cyberrt-程序员宅基地
- 【反调试】Windows 利用动态 AES 加密程序内存_aes 动态库-程序员宅基地