多传感器融合定位技术
标签: 1024程序员节
标签: 1024程序员节
多传感器融合定位课程学习记录 Contents 第1章-概述 第2章-3D激光里程计I 第3章-3D激光里程计II 第4章-点云地图构建及基于地图的定位 第5章-惯性导航原理及误差分析 第6章-惯性导航解算及误差模型 第7章-基于滤波的...
自动驾驶和机器人的多传感器融合定位算法基础-常用坐标系的介绍,内含自动驾驶最全学习资料。
基于激光的多传感器融合定位与建图 深蓝学院学习环境。 概述 本Repo为基于ROS melodic @ Ubuntu 18.04的学习环境。 为了节约安装配置的时间: 部分依赖项由于网络原因难以取得 新依赖的约会可能会导致与本地依赖的...
自动驾驶,多传感器融合定位中遇到的问题,需要估计的状态和位姿介绍。 并包含非常详细的完整自动驾驶学习资料
多传感器融合定位作业1
自动驾驶,机器人以及无人机领域中,常用的传感器以及融合方法和思路。内含最强自动驾驶学习资料的获取。
大气增强PPP/MEMS惯导/视觉里程计融合定位研究 初衷 学习组合导航和VIO相关内容. 希望和有兴趣的小伙伴一起交流 程序依赖 glog Eigen OpenCV 3.4 Ceres 1.14.0 使用说明 最新稳定测试版本对应为dev分支 Multi-...
标签: ros

来吧

目前融合定位常用的方法主要分为两大块,一块是基于滤波的方法,另一块是基于图优化的方法。上一节已经介绍过基于滤波的方法,本节主要针对基于图优化的方法展开详细介绍。
目前融合定位常用的方法主要分为两大块,一块是基于滤波的方法,另一块是基于图优化的方法。本节主要针对滤波方法展开详细介绍。
点击上方“3D视觉工坊”,选择“星标”干货第一时间送达导读高德定位业务包括云上定位和端上定位两大模块。其中,云上定位主要解决Wifi指纹库、AGPS定位、轨迹挖掘和聚类等问题;端上定位解...
Multi-GNSS PPP/INS/Vision/LiDAR tightly integrated system for precise navigation in urban environments
数据解压密码: 123456 初衷 学习组合导航和VIO相关内容. 希望和有兴趣的小伙伴一起交流 程序依赖 glog Eigen OpenCV 3.4 Ceres 1.14.0

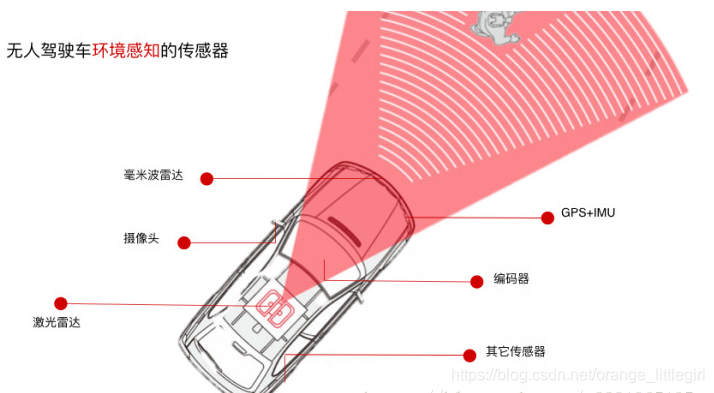
多传感器融合是一项结合多传感器数据的综合性前沿内容,主要包括Camera、激光雷达、IMU、毫米波雷达等传感器的融合,在自动驾驶、移动机器人的感知和定位领域中占有非常重要的地位;

深蓝学院-多传感器融合定位-第三章作业
ROS 中的 robots_localization 包是一个非常有用的包,可以使用各种卡尔曼滤波器融合任意数量的传感器!我们将使用它将全局姿势数据(x、y、z 和orientation)与机器人上的现有传感器融合,以实现更强大的定位!
导读 高德定位业务包括云上定位和端上定位两大模块。...特别是车机端定位,由于定位设备安装在车上,一方面,它可以搭载更丰富的定位传感器来解决特殊场景的问题,另一方面,各个传感器之间相互固连,有利于...
