
”多传感器融合“ 的搜索结果

多传感器融合(Multi-sensor Fusion, MSF)是利用计算机技术,将来自多传感器或多源的信息和数据以一定的准则进行自动分析和综合,以完成所需的决策和估计而进行的信息处理过程。 1. 基本原理 多传感器融合基本...

基于多传感器融合和卷积神经网络的机械故障智能诊断python实现源码.tar基于多传感器融合和卷积神经网络的机械故障智能诊断python实现源码.tar基于多传感器融合和卷积神经网络的机械故障智能诊断python实现源码.tar...
基于激光的多传感器融合定位与建图 深蓝学院学习环境。 概述 本Repo为基于ROS melodic @ Ubuntu 18.04的学习环境。 为了节约安装配置的时间: 部分依赖项由于网络原因难以取得 新依赖的约会可能会导致与本地依赖的...
基于ROS的多传感器融合感知系统实现(雷达+相机)
实现多个传感器采集的多通道数据的数据互相关,进行数据融合降维
自动驾驶和机器人的多传感器融合定位算法基础-常用坐标系的介绍,内含自动驾驶最全学习资料。
进一步,针对其弱可观测性,采用多个被动传感器集中式融合跟踪策略,提出了基于无迹卡尔曼滤波的被动多传感器融合跟踪算法.以3个被动站跟踪为例进行仿真研究,结果表明所提出的算法可达到比经典的扩展卡尔曼滤波算法更高...
随着机器人技术的不断发展,机器人的应用领域和功能有了极大的拓展和提高。智能化已成为机器人技术的发展趋势,而传感器技术则是实现...为了解决上述问题人们提出了多传感器融合技术(multi-sensorfusion)。
多传感器融合算法,可以将多传感器的数据经处理,相比单传感器数据更加有效
将深度学习引入人工智能领域,开展相关机器人技术在自主导航中的方法研究,开发集机械平台、嵌入式硬件、软件系统、SLAM算法、场景识别方法于一体的机器人综合系统框架,结合多传感器融合的环境信息,实时指导路径...
多传感器融合是一项结合多传感器数据的综合性前沿内容,主要包括Camera、激光雷达、IMU、毫米波雷达等传感器的融合,在自动驾驶、移动机器人的感知和定位领域中占有非常重要的地位;
大气增强PPP/MEMS惯导/视觉里程计融合定位研究 初衷 学习组合导航和VIO相关内容. 希望和有兴趣的小伙伴一起交流 程序依赖 glog Eigen OpenCV 3.4 Ceres 1.14.0 使用说明 最新稳定测试版本对应为dev分支 Multi-...
多传感器融合定位技术
标签: 1024程序员节
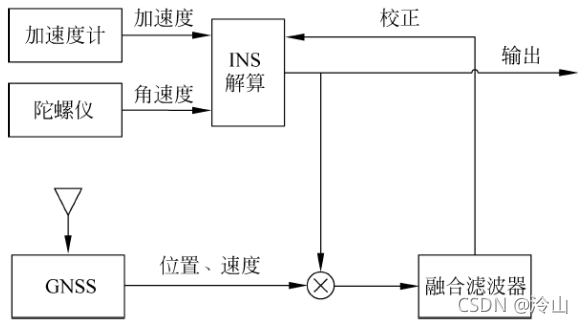
本文以误差状态卡尔曼滤波器(Error State Kalman Filter, ESKF)为滤波框架,对自动驾驶车辆的位置、速度和姿态信息进行状态估计,设计了 个多传感器融合的车辆里程计系统。系统以惯性测量单元(InertialMeasurement ...
本文将介绍多传感器融合系统的特点及体系结构。
传感器信息融合在不同层级上出现,可以分为数据级融合、特征级融合、决策级融合。
多传感器融合
标签: dataprocess
多传感器融合处理,课件记录。
开发者说丨手把手教你实现多传感器融合技术.pdf
基于EKF的时延补偿单传感器和多传感器融合框架

同时还包含ubuntu系统下的环境配置教程,如何搭建多传感器融合所需要的环境,点云去畸变以及对其问题,多相机的同步融合实战,相机与IMU的同步实战,相机与激光雷达的同步实战,激光与IMU的同步实战,相机与IMU的...
多传感器融合-第一章-常用传感器硬件介绍-20210619.pdf
提出采用超声波距离扫描传感器和视觉传感器数据融合技术实现室内环境复杂特征角和半平面的提取,以便更精确地重构环境特征。利用与坐标无关的对称扰动模型建立超声波扫描的环境特征模型、改进的扩展卡尔曼滤波估计...
自动驾驶系列报告之四_传感器篇_多传感器融合.pdf
本文在基千激光雷达和惯性测量元件融合的定位与建图方案的基础上, 引入车辆底盘上的轮速传感器和方向盘转角传感器,提出了一种基千激光雷达、 惯性剽量元件 和车辆传感器的多传感器融合方案。本文的主要研究内容...
多传感器融合定位课程学习记录 Contents 第1章-概述 第2章-3D激光里程计I 第3章-3D激光里程计II 第4章-点云地图构建及基于地图的定位 第5章-惯性导航原理及误差分析 第6章-惯性导航解算及误差模型 第7章-基于滤波的...
推荐文章
- 大数据技术未来发展前景及趋势分析_大数据技术的发展方向-程序员宅基地
- Abaqus学习-初识Abaqus(悬臂梁)_abaqus悬臂梁-程序员宅基地
- 数据预处理--数据格式csv、arff等之间的转换_csv转arff文件-程序员宅基地
- c语言发送网络请求,如何使用C+发出HTTP请求?-程序员宅基地
- ccc计算机比赛如何报名,整理:加拿大的CCC是什么,怎么报名?-程序员宅基地
- RK3568 学习笔记 : ubuntu 20.04 下 Linux-SDK 镜像烧写_rk3568刷linux-程序员宅基地
- Gradle是什么_gradle是干嘛的-程序员宅基地
- adb命令集锦-程序员宅基地
- 【Java基础学习打卡15】分隔符、标识符与关键字_java分隔符有哪三种-程序员宅基地
- Python批量改变图片名字_python批量修改图片名称-程序员宅基地