
”因子图优化“ 的搜索结果
LIO-SAM学习系列文章目录 提示:写完文章后,目录可以自动...二、为什么要使用因子图三、如何使用因子图总结 前言 一、因子图是什么? 二、为什么要使用因子图 三、如何使用因子图 总结 提示:这里对文章进行总结:
因子图优化最好的后端优化库之一,结构清晰,代码简洁易懂,很不错。
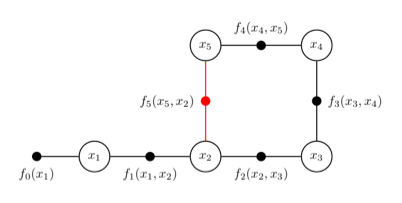
因子图优化就是将优化问题转换成图的形式,图由边、和顶点组成。边连接着顶点,表示顶点之间的一种关系。顶点表估计问题中的未知随机变量,而因子表示有关这些变量的概率信息,从测量或先验信息中可以得出。
SLAM基础-因子图优化和gtsam应用
最大化状态X的后验概率密度pX∣ZXMAPargXmaxpX∣ZargXmaxpZpZ∣XpX上式利用了贝叶斯法则,将后验概率密度表示为观测概率密度pZ∣X与状态的先验概率密度pX的乘积,再利用因子pZ进行归一化。当给定观测Z时,...
基于因子图优化的GNSS定位算法介绍
因子图优化学习---董靖博士在泡泡实验室的公开课学习_goldqiu的博客-程序员宅基地_因子图优化c++ 对于因子图的isam1和isam2论文,核心就是增量QR分解和贝叶斯树。 增量QR分解 对于高斯牛顿法中J(x)矩阵构成的线性...


专栏系列文章如下:
(一)贝叶斯网络
因子图优化学习---董靖博士在深蓝学院的公开课学习(1)_goldqiu的博客-程序员宅基地 二.因子图优化学习---董靖博士在深蓝学院的公开课学习(2)_goldqiu的博客-程序员宅基地 整理并分享因子图优化,欢迎大家指正。 .......

基于因子图优化的组合导航算法学习
标签: 学习
然而,最近基于优化的算法研究因其在恶劣的 GNSS 环境(例如城市中心,GNSS 观测受到多路径影响)中的卓越性能而受到大家的欢迎。目前此类相关的论文和开源代码有许多,涉及到GNSS、IMU、视觉和激光雷达等传感器。...
感觉因子图优化就是另一种位姿图解算,不过好像有增量更新,有助于简化计算,这个是解方程内部的事情,想要用好肯定要内部深入了解,来感受一下激光里程计、GPS因子、闭环因子如何一起因子图优化吧 /** * 添加激光...

红色是真值轨迹,绿色是有偏差的里程计轨迹,蓝色是优化后的轨迹,可以看见,回环优化后,蓝色轨迹相对于绿色轨迹有了很大的改善;我们使用了 python的因子图优化库 g2opy;

通过同时把T,P作为优化量来进行调整,对误差函数进行求解,就是所谓的BA 2、BA的求解 由于误差函数不是线性的,所以我们想到用增量△x的方法,逐步迭代。当给误差函数一个增量△x时,函数变为:
利用因子图建立SLAM的优化模型,在使用新的鲁棒代价函数基础上引入先验约束用于确认启用或关闭前端传递的环形闭合约束,从而使得后端拓扑图能够摒弃前端传递的假阳性环形闭合约束并朝向真实地图收敛,再利用L-M...


城市复杂场景下的 GNSS 信号容易受到建筑物遮挡或反射,多路径与非视距信号严重、粗差与周跳发生频繁,GNSS 定位精度与可靠性无法得到保障。
因子图matlab代码欢迎来到online-gpslam [高斯过程|增量| GTSAM 3.2 | SLAM] 这是Incremental Sparse GP Regression for Continuous-time Trajectory Estimation and Mapping论文的代码库,作者:Yan Yanyan,Vadim ...
然而,最近基于优化的算法研究因其在恶劣的 GNSS 环境(例如城市中心,GNSS 观测受到多路径影响)中的卓越性能而受到大家的欢迎。目前此类相关的论文和开源代码有许多,涉及到GNSS、IMU、视觉和激光雷达等传感器。...
今天看到了一篇关于滤波框架和因子图优化在无人系统定位中的对比和思考的知乎文章。 https://zhuanlan.zhihu.com/p/127114978?utm_source=wechat_session
推荐文章
- 阿里云企业邮箱的stmp服务器地址_阿里云stmp地址-程序员宅基地
- c++ 判断数学表达式有效性_高考数学大题如何"保分"?学霸教你六大绝招!...-程序员宅基地
- 处理office365登录出现服务器问题_o365登陆显示网络异常-程序员宅基地
- Nginx RTMP源码分析--ngx_rtmp_live_module源码分析之添加stream_ngx_rtmp_live_module 原理-程序员宅基地
- 基于Ansible+Python开发运维巡检工具_automation_inspector.tar.gz-程序员宅基地
- Linux Shell - if 语句和判断表达式_shell if elif-程序员宅基地
- python升序和降序排序_Python排序列表数组方法–通过示例解释升序和降序-程序员宅基地
- jenkins 构建前执行shell_Jenkins – 在构建之前执行脚本,然后让用户确认构建-程序员宅基地
- 如何完全卸载MySQL_mysql怎么卸载干净-程序员宅基地
- AndroidO Treble架构下HIDL服务查询过程_found dead hwbinder service-程序员宅基地