”为什么选择ROS2“ 的搜索结果
四个字:大势所趋。 半自动驾驶汽车全面普及的时代 软件重新定义汽车(这就是机器人啊)...ROS2教程文档使用说明与为什么选择ROS2?(2019) 未来趋势,当下从软件到硬件都逐步成熟。 毕竟总不能拿个民用芯片做.
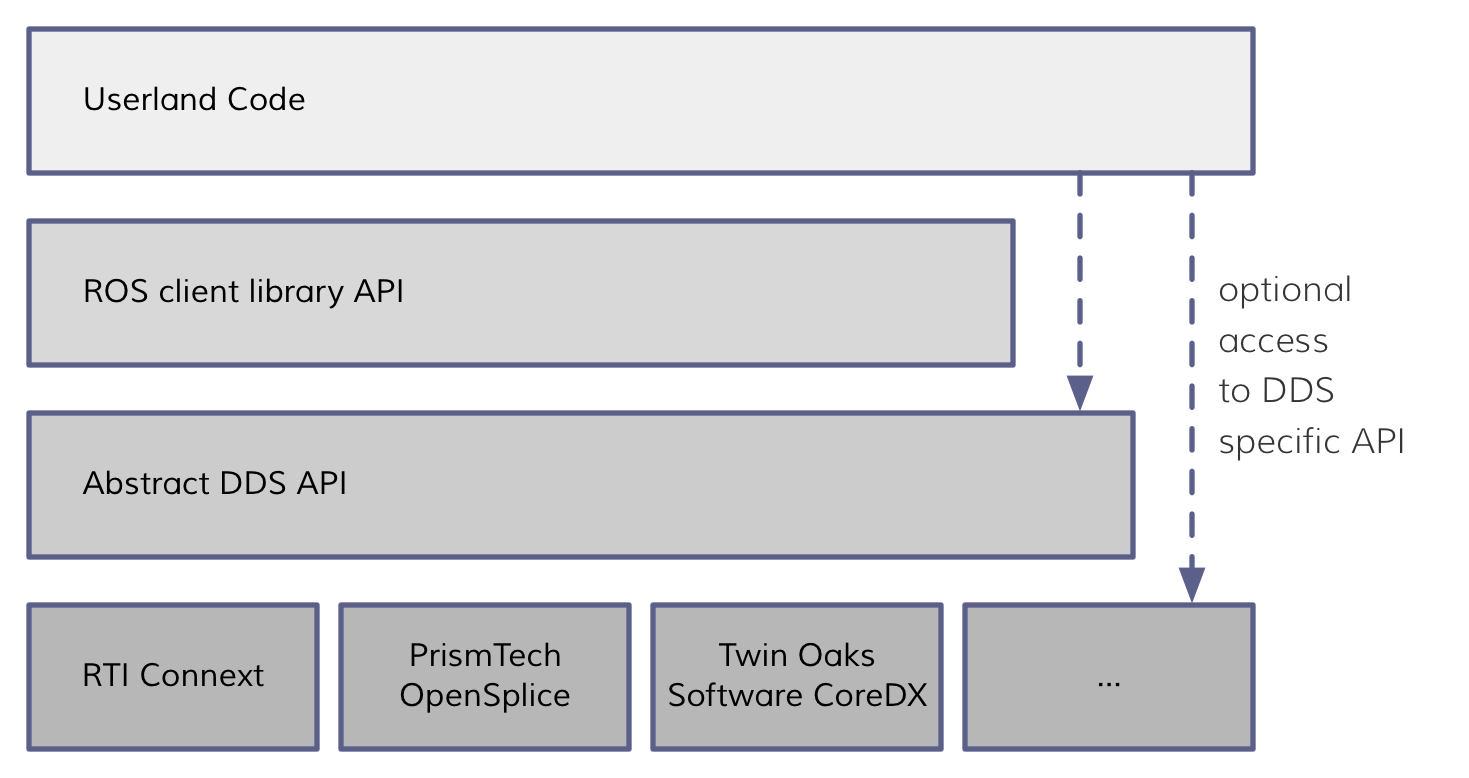
文章主要介绍了为什么选择DDS,DDS主要优势,DDS与其他物联网技术比较?不同协议的比较。来自于dds-foundation.org,,由火龙果软件Anna译、推荐。OMG-DDS标准针对需要实时数据通信交换的高性能、高可扩展的工业物联网...
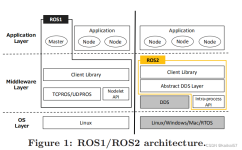
ROS2编程基础课程文档 ROS 2(机器人操作系统2)是用于机器人应用的开源开发套件。ROS 2之目的是为各行各业的开发人员提供标准的软件平台,从研究和原型设计再到部署和生产。 ROS 2建立在ROS 1的成功基础之上,ROS 1...
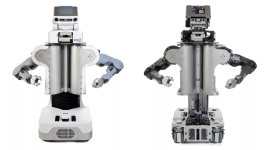
我们的主要目标是为用户提供使用 PR2 进行新颖研究和开发项目所需的软件工具。同时,我们知道 PR2 不会是世界上唯一甚至最重要的机器人,我们希望 ROS 对其他机器人有用。因此,我们投入了大量精力来定义抽象级别...
为了提高开发效率,可以先安装集成开发工具和使用方便的工具,本教程用VSCode搭建ROS2工程环境
ros1和ros2的区别,要点记录
ROS2 学习(一)ROS2 简介与基本使用
【ROS2】MOMO的鱼香ROS2(二)ROS2入门篇——ROS2初体验
该例程主要用于ROS之间压缩图像的传输,ROS发布压缩图像的速度比传输原图像的速度快很多,而工业相机一般都会发布压缩图像。本程序包将压缩图像功能封装成一个类,在launch中即可设置压缩图像话题、发布话题、输出...
记录了日常使用时,对ros1与ros2的区别的一些笔录,希望对有需要的人有所帮助(^_^) 如果有写的不对的地方还望大家指正,共同学习。

在上一讲开发环境搭建中,我们讲解了如何搭建Ubuntu系统环境和ROS2开发运行环境。类似ros1 master中心节点功能,用于减少节点之间发现的时间。info 显示话题消息类型,订阅者数量,发布者数量。创建功能包命令:指定...
对于初学ROS的同学,如果没有有效的学习规划,那么不妨看看该文,在这里,我们将对ROS2出现的知识板块进行介绍,期望对初识ROS2的同学起到导航作用。

在ROS操作系统开发应用程序时,我们常常需要调试代码,验证程序的正确性。但是在用rosrun或者roslaunch启动节点后,若程序运行过程中发生错误而导致发生出错停止工作,这时候终端并不会输出具体的信息指出在何处发生...
我们在开发ROS2程序时会发现,当面对只有一个node节点时,程序的调用是线性的,这个时候就会有两种解决方式,一种就是使用...callback_group为所有的callback分了组别,分别为:这样也以为这我们可以有效地对ROS2中的
ROS2 Control分析讲解
标签: ROS
是一个使用(ROS 2)进行机器人(实时)控制的框架。它的软件包重写了ROS(机器人操作系统)中使用的软件包。的目标是简化新硬件的集成并克服一些缺点。1本文对于做了总体的介绍,后续会做一个真实机器人controller ...

每版的Ubuntu系统版本都有与之对应ROS版本的,每一版ROS都有其对应版本的Ubuntu版本,不可随便装,ubuntu20.04对应ROS1 noetic和ROS2 foxy版本。
如果你选择了这个选项,你会看到一个简单的界面,允许你选择要安装Ubuntu的硬盘,并通过滑块来决定你希望Ubuntu使用的磁盘空间大小。如果你的电脑有多个硬盘驱动器,那么只要它们各自有自己的驱动器,这个选项就能让...
ROS到ROS2的多节点组合运行
标签: ros
但是在ROS2中如何使用多节点组合去完成管理,这也是我们需要去了解和学习的。在ROS1中你可以写一个节点也可以写一个小节点(Nodelet)。 ROS 1 的节点会被编译成一个可执行文件。 ROS 1的小节点会被编译成一个动态链接...
wget http://fishros.com/install -O fishros && . fishros
在大佬们的教程的基础上做了一点小小的修改。
推荐文章
- withRouter,非根组件获取路由参数_withrouter 只能取到路由中的一个参数-程序员宅基地
- ubuntu环境下QT5操作摄像头报错,cannot find -lpulse-mainloop-glib cannot find -lpulse cannot find -lglib-2.0_cannot find–lpulse-程序员宅基地
- 用jbpm_bpel学jwsdp的ant方式使用-程序员宅基地
- 输入数字判断星期几_html获取当前星期几-程序员宅基地
- SpringBoot整合Activiti7——实战之放假流程(会签)_activit7中会签-程序员宅基地
- 阿里云服务器收到挖矿病毒的攻击,导致基础的文件被病毒污染的问题和对应的处理解决方法-程序员宅基地
- 北京东城区空调维修办法,格力变频空调出现ph,到底是怎么回事?_格力变频空调ph代码-程序员宅基地
- vscode编辑器使用拓展插件background添加背景图片改变外观_background vscode-程序员宅基地
- android 简单打电话程序_android拨打电话的程序-程序员宅基地
- 第二届中国(泰州)国际装备高层次人才创新创业大赛_泰州市双创人才计划2022-程序员宅基地