《视觉slam介绍》PPT,《视觉slam介绍》课件,《视觉slam介绍》
”《视觉slam介绍》PPT“ 的搜索结果
精品课程PPT分享,视觉SLAM十四讲配套PPT, 全网唯一资源
讲述视觉SLAM14讲
视觉slam介绍,视觉slam介绍课件,视觉slam介绍PPT
视觉SLAM十四讲-高翔 完整版
SLAM 十四讲 课件 slam
标签: slam
SLAM 十四讲 课件 slam

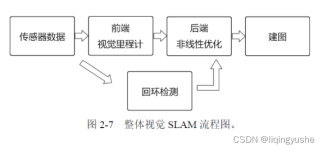
1.PDF格式的PPT只读文档 2.简单介绍了SLAM基本概念和目的 3.简单介绍了经典视觉SLAM框架
slam十四讲视频配套ppt
SLAM _ 视觉SLAM中的前端:视觉里程计与回环检测 另外,还包含以下资料的获取: 涵盖感知,规划和控制,ADAS,传感器; 1. apollo相关的技术教程和文档; 2. adas(高级辅助驾驶)算法设计(例如AEB,ACC,LKA等) 3....
这是我做的一个关于视觉SLAM中回环检测部分的PPT,用于课堂上的presentation,可以自行下载查看,不设置积分。参考于《视觉SLAM十四讲从理论到实践 第2版》。
高翔视觉slam十四讲学习(1)
标签: slam
1. SLAM概述 1.1 概念 SLAM(Simultaneous Localization and Mapping):同时定位与地图构建,指搭载特定传感器的主体,在没有环境先验信息的情况下,于运动过程中建立环境的模型,同时估计自己的运动。 1.2 SLAM...


1. PDF格式的PPT只读文档 2. 针孔相机模型 3. 畸变模型 4. 双目相机模型 5. RGB-D 相机模型
计算机视觉 SLAM 2018浙大暑期slam夏令营PPT 2018浙大暑期slam夏令营PPT 大全!
基于欠点特征环境下的slam算法研究,探究了两种方法;1、基于双kinect的rgbd slam,双Kinect 相对固定且无重叠视野,该部分涉及双kinect的外参数标定与slam过程;2、基于直线特征的rgbd slam,利用3D直线信息进行...
SLAM9讲+PPT+视觉彩色测试图 SLAM9讲+PPT+视觉彩色测试图 SLAM9讲+PPT+视觉彩色测试图
布法罗大学SLAM讲义PPT下载。 1、SLAM 是一种用于在未知环境或已知环境中构建地图同时跟踪当前位置的技术。 2、为了构建地图,我们必须知道我们的位置;为了确定我们的位置,我们需要一张地图! 3、同步定位与地图...
高翔视觉slam第一讲课件,习题,习题答案,参考书籍等资料
本资源包括高翔SLAM十四讲1-6章PPT,便于简化理解和日常讲解摘要使用。
1.PDF格式的PPT只读文档 1. 四元数的定义 2. 四元数的运算 3. 用四元数表示旋转 4. 四元数到其他旋转表示的转换
1.PDF格式的PPT只读文档 2.点、向量和坐标系 3.坐标系间的欧氏变换 4.变换矩阵与齐次坐标

1.PDF格式的PPT只读文档 2.SO(3) 上的指数映射 3.SE(3) 上的指数映射
1.PDF格式的PPT只读文档 2.旋转向量 3.欧拉角
计算机视觉 SLAM 2019浙大slam技术应用暑期学校ppt(大全)
章国锋-视觉SLAM技术及应用
标签: SLAM
SLAM前沿报告,浙江大学,章国锋-视觉SLAM技术及应用。

推荐文章
- com.netflix.discovery.shared.transport.TransportException: Cannot execute request on any known serve-程序员宅基地
- PAT乙级练习题1010 一元多项式求导_pat 乙级 1010-程序员宅基地
- You can also run `php --ini` inside terminal to see which files are used by PH P in CLI mode_you can also run `php --ini` in a terminal to see -程序员宅基地
- 对UDP校验和的理解_udp 数据包 校验和 checksum=0-程序员宅基地
- 递归遍历文件夹,以c:/windows为例-程序员宅基地
- git 本地与远程的链接_git如何本地和网页链接-程序员宅基地
- ArrayList与HashMap遍历删除元素,HashMap与ArrayList的clone体修改之间影响_在arraylist和hashmap遍历的同时删除元素,可能会导致一些问题发生-程序员宅基地
- Chapter2-软件构造过程和生命周期_iterative and agile systems development lifecycle -程序员宅基地
- 4.6 浮动定位方式float_c语言中float的左右浮动属性示例-程序员宅基地
- OSS上传【下载乱码问题】_阿里云oss文件名乱码-程序员宅基地