
”《视觉SLAM十四讲》笔记“ 的搜索结果

2D-2D 应用场景 根据两相机图片,进行匹配求解相机的旋转变换阵。大致两个过程:1)特征对匹配 2)利用匹配的特征点对求解相机的转换矩阵。下面是稍微具体的方法。 求解方法 对极约束 方程: xT2t∧Rxi=0 ...
“定位”和“建图”,可以看成感知的“内外之分”。 传感器分类: 传感器分为两类: 一类传感器是携带于机器人本体上的,例如机器人的轮式编码器、相机、激光等等。另一类是安装于环境中的,例如导轨、二维码标志...
拼接点云 #include<iostream> #include<fstream> using namespace std; #include<opencv2/core/core.hpp> #include<opencv2/highgui/highgui.hpp>...pcl/point_types.h>.
在单目相机中,我们无法通过单个图片来计算场景中物体离我们的距离(远 近)——之后我们会看到,这个距离将是 SLAM 中非常关键的信息。由于我们人类见过大 量的图像,养成了一种天生的直觉,对大部
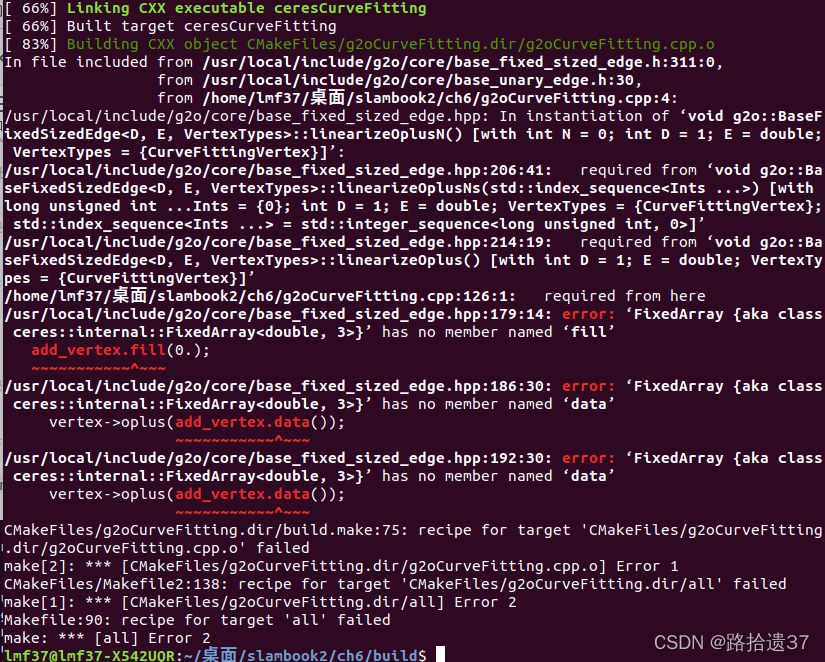
编译过程中,cmake ..报错如下: CMake Error at CMakeLists.txt:8 (find_package): Could not find a configuration file for package "OpenCV" that is compatible with requested version "4". ...
一.安装系统ubuntu16.04 分区 /boot 逻辑分区,空间起始位置,200M 交换空间 逻辑分区,空间起始位置,2倍内存(我是4g,所以421024=8192M) /主分区 逻辑分区,空间起始位置,尽可能大一些(至少20g) ...
转自:https://www.cnblogs.com/newneul/p/8407369.html#include #include using namespace std; #include #include #include #include // for formating strings #include #include #include ...int main(
随手翻了下,这是《视觉slam十四讲》书里最理论的一章了,看完了觉得也挺有趣的! 理论部分 李群与李代数是什么?为什么slam要引入它们? 李群 首先从群说起,群是一种只定义一种运算的集合,需要满足“封结幺逆”四...

SLAM是搭载特定传感器的主体,在没有环境先验信息的情况下,于运动过程中建立环境的模型。 定位和建图可以看成感知的内外之分,一方面要明白自身的状态,另一方面也要了解外在的环境。 将传感器分为两类,一类传感器...
6.1 状态估计问题 6.1.1 最大后验与最大似然 贝叶斯法则 似然是指"在现在的位姿下,可能产生怎样的观测数据"。 最大似然估计“在什么样的状态下,最可能产生现在观测到的数据”。... 6.2.2...

Chapter11 后端2位姿图位姿图的意义位姿图的优化 位姿图 位姿图的意义 随着时间的流逝,空间点和相机位姿数据不断增多,BA的计算效率会不断下降。 实际上,经过若干次优化迭代之后,空间位置估计会收敛至一个值...

文章目录第五讲 相机与图像5.1 相机模型5.1.1 针孔相机模型5.1.2 畸变5.1.3 双目相机模型5.1.4 RGB-D相机模型5.2 图像5.2.1 计算机中图像的表示5.3 实践:图像的存取与访问5.3.1 安装OpenCV5.3.2 操作OpenCV图像5.4 ...
一.安装cmake 安装cmake、g++编译器 sudo apt-get install cmake g++ 二....sudo apt-get install kdevelop 安装后可以在搜索栏找到 三....sudo apt-get install libeigen3-dev ...在十四讲SLAMBOOK里面有安装包-3
像素坐标是讲像素的,看分辨率 相机模型坐标转换步骤 世界——相机——归一化平面——像素 相机畸变 小结♥ 双目模型 RGB-D相机 TOF发射脉冲激光,计算返回时间差,乘上光速得到深度 结构光:看从物体返
由此我们知道要想属于旋转矩阵这个集合,就必须满足R与R的逆乘积必须为单位矩阵。在4.1小节中提到过旋转矩阵与变换矩阵对加法是不封闭的。

视觉SLAM十四讲第十一讲笔记
标签: slam
视觉SLAM十四讲第十一讲笔记 带有相机位姿和空间点的图优化称为BA,能够有效地求解大规模的定位与建图问题。但是,随着时间的流逝,机器人的运动轨迹将越来越长,地图规模也将不断增长。像BA这样的方法,计算效率就...
标题# 视觉SLAM十四讲 实践笔记 (一) 这篇文章用于记录我在练习《视觉SLAM十四讲:从理论到实践》中代码部分时,我认为比较重要的语句和我遇到问题和解决方式。 代码从第三章开始 实践:Eigen #include<Eigen...
SLAM十四讲是高翔博士写的非常经典的视觉slam书籍,记录下学习心得,与大家分享学习。 一、知识总结 1、slam英文为Simultaneous Localization and Mapping,意思是同时定位与建图。它指搭建特定的传感器的主体,在...
文章目录12.3.2 实践:创建字典12.4.2 实践:相似度的计算12.5.1 增加字典规模 本博客的内容是本章程序编译运行方法,记录调通本章程序的过程、处理遇到报错的解决方法。 ... 12.3.2 实践:创建字典 ...



总体思路 对两幅图像img_1,img_2提取特征点 特征点匹配 通过相机内参求取特征点对应的相机坐标X,Y,获取特征点的深度信息Z。 通过SVD分解,求除相机的位姿R,t。 计算质心p1 += pts1[i];p1 = Point3f(Vec3f(p1) / N...
推荐文章
- Android 编译so文件 MP4V2_android下编译mp4v2-程序员宅基地
- 通讯录Contact_02_contact文件内容-程序员宅基地
- Qt笔记(四十二)之QZXing的编译 配置 使用_qzxingfilterrunnable error:-程序员宅基地
- 关于画图软件Dia打开程序始终为英文界面的问题-程序员宅基地
- OpenCV从入门到精通实战(二)——文档OCR识别(tesseract)-程序员宅基地
- 详解avcodec_receive_packet 11_avcodec_receive_packet eagain-程序员宅基地
- OpenGL SuperBible 7th源码编译记录_superbible7-media github-程序员宅基地
- Wireshark简单使用-程序员宅基地
- MXNet 粗糙的使用指南_iou loss mxnet-程序员宅基地
- iOS对ipa包进行代码混淆《二》 ---代码混淆_ipa包混淆-程序员宅基地