CMake(十一):策略
标签: cmake
cmake系统学习
标签: cmake
cmake系统学习
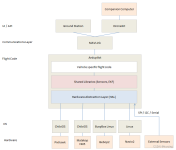
1. MAVLink简介 MAVLink(Micro Air Vehicle Link,微型空中飞行器链路通讯协议)是无人飞行器与地面站(Ground Control Station ,GCS)之间通讯,以及无人飞行器之间通讯最常用的协议。它已经在PX4、APM、PIXHAWK...
1、ps -T -p <pid> ps -T -p 116115|wc -l 2、top -H -p 116115 查看进程的线程使用率 3、pstree -p 116115|wc -l
cmd命令行报错信息,如下: PS D:\whx\AndroidStudioProject\VolumeII\Sample8_4\src\main\jni> ndk-build Android NDK: APP_PLATFORM not set. Defaulting to minimum supported version android-14. ...
git clone --recursive...无法递归进子模组路径 'cmake/external/grpc/third_party/bloaty' 无法递归进子模组路径 'cmake/external/grpc' git clone不完整,在clone项目下执行如下来更新子模块组 git submodule up...
APM 4.2.3以测距传感器的串口驱动为例进行阅读其他的传感驱动都与之类似如果疏漏或谬误,恳请指出。

一、开篇 “您有无人机么? 没有。 那赶紧去某宝买一套。” 昨天开会开到接近下午一点钟,收获相当大,原本不太清楚的ardupilot框架现在也大致熟悉了,接下来主要就是结合源码了解其控制过程了,整体控制台...
git clone https://github.com/UAVCAN/libuavcan.git cd libuavcan git submodule update --init ./bootstrap.sh mkdir build cd build cmake .. # Default build type is RelWithDebInfo, wh...

协议定义 :UAVCAN协议基于标准CANBus 2.0B协议。基于29bit的扩展帧。通讯速率为500k bps。在UAVCAN协议中,只用到了 CANBus 中定义的数据帧,所有的数据通过数据帧来传输。我们将数据帧定义成以下格式:配置飞控的...

标签: 飞控
小白入门Ardupilot
标签: 人工智能

Administrator@PC-20160608XXZA ~ $ cd ardupilot1 Administrator@PC-20160608XXZA ~/ardupilot1 $ cd ardupilot Administrator@PC-20160608XXZA ~/ardupilot1/ardupilot $ ./waf configure --board fmuv3 ...


ArduPilot之开源代码Library&Sketches设计。作为RangeFinder传感器主要的目的是检测飞机与地面之间的距离注:不同设备更新频率方面主要在驱动中进行数据采集更新,详见驱动代码的init方法中如何挂定时回调钩子函数。
Ardupilot官网关于《Learning the code》的翻译 —《线程》。

libcanard-0.2以及pyuavcan

本文主要梳理,Ardupilot中光流传感器的代码运行流程,以及如何选择相应的光流传感器类型。
PyUAVCAN is a Python library for working with UAVCAN, a lightweight protocol designed for communication in aerospace and robotics applications. To simulate UAVCAN using PyUAVCAN, follow these steps: ...
点击目录进行跳转一、遇到如下问题:二、一种可能的解决方案三级目录__init__.py源码备份(必要时恢复) 一、遇到如下问题: 二、一种可能的解决方案 推荐查看网址1:...
背景 两年前接了个小项目,使用TI公司的单片机做飞控。这是学校的实验项目,主要是演示、推广之类的用途,要求不高。接触Ardupilot数年矣,一直想搞点大动作,正好借着这次机会,来一次真正的移植。...
四旋翼无人机硬件 一 总览 四旋翼无人机的硬件组成:无刷电机(4个);电子调速器(简称电调,4个,常见有好盈、中特威、新西达等品牌);螺旋桨(4个,需要2个正浆,2个反浆);飞控;电池(11.1v航模动力电池)...

Ubuntu1804下的ROS与PX4无人机仿真平台基础配置 参考资料: ...本文主要是对搭建肖坤的XTDrone项目过程的一个总结,同时记录过程中遇到一些问题与心得,如有侵权请联系删除 依赖安装 sudo apt install -y ninja-build ...