从零开始学习UCOSII操作系统6--事件控制块1、任务和任务,任务和中断子程序是如何进行通信的?--事件控制块事件控制块使用的几点须知:(1)任务或者中断服务子程序可以给事件控住块ECB发送信号。(2)中断服务子程序不...
”uCOS-II事件控制块“ 的搜索结果
任务与任务,任务与中断服务程序之间可以通信,通信介质称为事件控制块。通信方式有以下几种,如下图: (1)中断服务程序或者任务可以给ECB发送信号;只有任务能够等到中断服务程序或者ECB发送的信号;...
本文主要介绍的是uCOS II 的事件控制块学习。
信号量能共享。 邮箱是一对一。 三者都需要用事件控制块来创建。 三者都叫:事件。
通过 uCOS_II.H 中定义的 OS_EVENT 数据结构来维护一个事件控制块的所有信息,也就是控制块 ECB。 OSEventType 定 义 了 事 件 的 具 体 类 型 。 它 可 以 是 信 号 量 ( OS_EVENT_SEM ) 、 邮 箱(OS_EVENT_...
嵌入式实时操作系统uCOS-II:第5章 事件控制块.ppt
事件控制块 事件控制块使用的几点须知: (1)任务或者中断服务子程序可以给事件控住块ECB发送信号。 (2)中断服务子程序不能等待事件控制块ECB给它发送信号的。 (3)等待事件可以设置超时时间,后面会详细的说明实现的...

UCOS-II学习文档
标签: 实时操作系统
介绍 uCOS-II中的事件控制块ECB的初始化操作和实际应用。
ucos-II 采用了事件控制块(ECB)的机制完成任务与任务、中断与任务之间的交互。并在此基础上扩展实现了信号量、互斥信号量、消息邮箱和消息队列。理解ucos-II的ECB主要看以下几方面的代码(包含在core.c中): 1. ...

uCOS-II 总结
标签: uCOS-II
uCOS-II的任务由任务控制块管理,在任务每个循环的末尾通过调用OSTimeDly()或者OSTimeDlyHMSM()来将当前任务从任务就绪表移除,并将该任务控制块内OSTCBDly赋予新值,然后进行一次任务调度让出CPU控制权。...
文章目录1 简介1 uCOS-II中的任务 1 简介 uCOS-II实时操作系统 实时操作系统与分时操作系统的区别:分时...这个操作系统如何管理任务:任务控制块TCB。 这个操作系统的任务分为系统任务和用户任务,系统任务是系统内
OS_MAX_EVENTS在应用中最大事件控制块的个数,包括信号量、邮箱、和消息队列的总和。因为每个信号量、邮箱和消息队列都占用一个事件控制块。例如在实例程序中,用了一个邮箱,一个消息队列,一个互斥信号量,所以该...

现在我经常用ucos-ii操作系统,所以,每天抽个空总结一下关于ucos-ii的相关知识点吧,今天就先总结ucos-ii的任务。 要想了解一个操作系统,最简单直接的办法就是尝试去用它,那在用它的时候呢,你可以不用理解程序...
uCOS-II 的任务上下文切换流程
uCOS-II内核之任务控制块 前面的学习已经了解过任务控制块。知道任务在创建的时候,任务控制块会被初始化。任务控制块是一个数据结构,当任务的CPU使用权被剥夺时,ucos II用它来保存该任务的状态。当任务重新得到...
uCOS-II任务间通信之事件控制块 信号、邮箱、消息队列都是需要先创建才能使用的,创建以上三者需要用到事件控制块这一东西。 那什么是事件控制块呢? 可以这样理解,前面学习我们已经知道,创建一个任务需要给这...
从任务的存储结构来看,uCOS-II的任务由三个组成部分构成:任务程序代码,任务堆栈和任务控制块。其中,任务控制块用来保存任务属性;任务堆栈用来保存任务工作环境;任务程序代码是任务的执行部分。 uCOS-II的...
uCOS-II内核之任务控制块 前面的学习已经了解过任务控制块。知道任务在创建的时候,任务控制块会被初始化。任务控制块是一个数据结构,当任务的CPU使用权被剥夺时,ucos II用它来保存该任务的状态。当任务重新得到...
UCOS-II任务设计 任务函数的结构: 在用户任务函数中,必须包含至少一次对操作系统服务函数的调用,否则比其优先级低的任务将无法得到运行的机会,这是用户任务与普通函数的明显区别。 任务函数按照执行方式分为三...
第一篇 UCOS介绍 ... uC/OS II(Micro Control Operation System Two)是一个可以基于ROM运行的、可裁减的、抢占式、实时多任务内核,具有高度可移植性,特别适合于微处理器和控制器,是和很多商业操作
答: 任务控制块(OS_TCBs)是μC/OS-Ⅱ的核心数据结构,当任务的CPU使用权被剥夺时,μC/OS-Ⅱ用它来保存该任务的状态。答: (1)优先级调度算法原理为:给每一个任务分配一个惟一优先级,各优先级用一个整形数值...
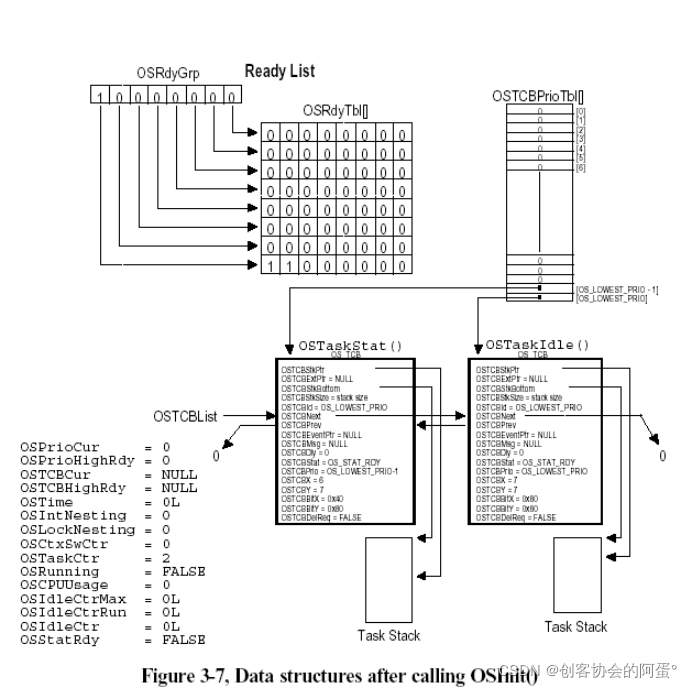
uCOS-II内核之初始化及启动 现在解释下程序编写的依据和实现过程。 在uCOS-II里,在创建一个任务(或者调用其它系统服务之前),是需要先初始化系统,初始化uCOS-II需要调用函数OSInit()。 调用函数OSInit()的作用是...
1、 任务间的同步和事件控制块 2、 信号量及其操作 3、互斥型信号量和任务优先级反转 4、消息邮箱及其操作 5、消息队列及其操作
多任务操作系统的主要工作是为系统中处于就绪状态的任务分配CPU资源,其中涉及的两个关键是:判断哪些任务处于就绪状态、确定哪个任务应该马上得到执行,即任务调度。1. 任务就绪表任务就绪表记录了系统中所有处于...
1、实时操作系统应满足的条件: (1)实时操作系统必须是多任务系统; (2)任务切换的时间与系统中的任务数量无关; (3)中断延时的时间预知并尽可能的短。 2、内核的分类: 不可剥夺型内核(也叫合作型多任务内核...
推荐文章
- withRouter,非根组件获取路由参数_withrouter 只能取到路由中的一个参数-程序员宅基地
- ubuntu环境下QT5操作摄像头报错,cannot find -lpulse-mainloop-glib cannot find -lpulse cannot find -lglib-2.0_cannot find–lpulse-程序员宅基地
- 用jbpm_bpel学jwsdp的ant方式使用-程序员宅基地
- 输入数字判断星期几_html获取当前星期几-程序员宅基地
- SpringBoot整合Activiti7——实战之放假流程(会签)_activit7中会签-程序员宅基地
- 阿里云服务器收到挖矿病毒的攻击,导致基础的文件被病毒污染的问题和对应的处理解决方法-程序员宅基地
- 北京东城区空调维修办法,格力变频空调出现ph,到底是怎么回事?_格力变频空调ph代码-程序员宅基地
- vscode编辑器使用拓展插件background添加背景图片改变外观_background vscode-程序员宅基地
- android 简单打电话程序_android拨打电话的程序-程序员宅基地
- 第二届中国(泰州)国际装备高层次人才创新创业大赛_泰州市双创人才计划2022-程序员宅基地