参考博客:http://blog.csdn.net/robinhjwy/article/details/77334189一:SO3Eigen::Matrix3d R = Eigen::AngleAxisd(M_PI/2, Eigen::Vector3d(0,0,1)).toRotationMatrix();...Sophus::SO3 SO3_R(R); ...
”so3“ 的搜索结果

安装sophus存在的问题: 1、CMakeFiles/Sophus.dir/build.make:65: recipe for target ‘CMakeFiles/Sophus.dir/sophus/so2.cpp.o’ failed make[2]: *** [CMakeFiles/Sophus.dir/sophus/so2.cpp.o] Error 1 ...
fatal error: sophus/so3.hpp: 没有那个文件或目录 #include "sophus/so3.hpp"* 使用的Ubuntu系统版本为 16.04 ,使用的是高翔博士提供的模板类Sophus库(基于模板的Sophus库和Eigen一样,仅含头文件没有源文件) ...
一般安装在/usr/local/lib目录下,如果不确定,可以使用ls /usr/local/lib查看里面是否有你需要的库文件。执行:sudo /sbin/ldconfig -v。
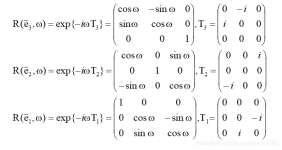
一文读懂旋转矩阵,欧拉角,以及万向锁问题 一:物体的姿态描述 物体的姿态可由固定于此物体的坐标系描述,为了规定空间某刚体B的姿态,设置一直角坐标系{B}与此刚体固接。用坐标系{B}的三个单位主矢量{Xb,...
【代码】高翔《自动驾驶中的slam技术》第2章代码。
气相蒸发Ti-Fe系合金纳米粉末相生成规律及尺寸效应研究,严红革,高伟,采用电弧加热蒸发法制备出了粉末粒度在5nm~30nm的Ti-Fe系合金纳米粉末,研究了纳米粉末的相生成规律以及混合物粉末的尺寸效应。...

博客中程序参考/slambook/project/0.2/src/visual_odometry.cpp一:理解各种表示下的R,t变量关系 void VisualOdometry::poseEstimationPnP() { vector<Point3f> pts_3d; vector&...
问题: 打开g2o_viewer时,g2o_viewer:未找到命令 原因: 在对g2o进行cmake时,会出现如下图的提示:Found unsuitable Qt version 和 Cound NOT find QGLVIEWER 解决方法: 首先删除qt4,再安装qt5,并装依赖...

对于任意的X,Y ,Z 属于 V ,[X,[Y,Z]] + [Z,[X,Y]]+ [Y,[Z,X]] = 0。结果可以看出并不是全0;只是一个反对称矩阵。但是如果你把每一项都仔细拆开,可以发现,每一项其实都为0。 matlab验证代码如下。

github上克隆了一个工程代码,在make的时候报错,错误的提示是没有sophus/so3.h这个文件,按照流程sophus是安装在usr/local/sophus下面了。但是报找不到,且安装的是比较老的非模板类sophus。 其中尝试了重新安装,...
定义:SO(3)={R| R^转置 R= I,det (R)=±1};SO(3)是包含旋转矩阵R的一种特殊正交群,我们称之为三维旋转群。
1.print(' float()函数,将其他数据类型转成float类型')3.字符串中的数据如果是非数据串,则不允许运行。2.float函数最少保留到小数点后一位。
error: static assertion failed: INVALID_VECTOR_VECTOR_PRODUCT__IF_YOU_WANTED_A_DOT_OR_COEFF_WISE_PRODUCT_YOU_MUST_USE_THE_EXPLICIT_FUNCTIONS #define EIGEN_STATIC_ASSERT(X,MSG) static_assert(X,#MSG);...
Sophus库好多重定义报错,原因是 Thirdparty/Sophus 库和系统已经安装的 Sophus库发生了冲突,解决办法:安装 Thirdparty/Sophus 库覆盖。
1.Convergence and Consistency Analysis for a 3-D Invariant-EKF SLAM(泛读)(ICRA2017)引用 9 摘要翻译: 在这篇文章中,我们调查了基于RIekf的SLAM算法的收敛性和一致性...相比起SO3-ekf仅仅再确定刚体变换...
Ceres优化库使用
标签: ICP

如果有问题请下载安装MYSQL5.0然后导入端里面自带的guaiwu.sql希望ol教程=========================================客户端SO3D.exe需要改IP 我这里是在服务器上录像的,我把客户端的SO3D.exe复制到服务端这里了具体...
0.2版本实现一个基本的VO,也就是两两帧间的无结构VO,它的任务是根据输入的图像,计算相机运动和特征点位置。在这里我们只关心运动,不关心结构,也就是说只要通过特征点成功的求出了运动,我们就不再需要这一帧的...
1.滴定分析中,若怀疑试剂在放置中失效可通过()的方法检验。A.仪器校正B.对照试验C.空白试验D.无合适方法2....A.滴定时所加试剂中含有微量的被测物质B.滴定管的最后一位数偏高或偏低C.所用试剂含干扰离子D....
VIO-第1章 概述与课程介绍
标签: slam
VIO-第1章 概述与课程介绍VIO-第1章 概述与课程介绍内容总结内容:预备知识汇总:VIO 概述1.VIO:2.种传感器比较:3.两种融合方案4.主要总结:预备知识1.三维刚体运动(2种):2.两种导数(具体推导请自行查看《SLAM...
一、Sophus库的安装和引用 1、Ubuntu18.04下安装Sophus库 1)从以下网址中下载Sophus库: ...或者从视觉SLAM十四讲第二版的github链接中进入: ... 也可以直接在终端用git clone 克隆 2)
_(:зゝ∠)_觉得有用点个赞谢谢 1.验证SO(3)、SE(3)和Sim(3)关于乘法成群: 首先看特殊正交群SO(3)的定义:; 定义两个李群,要证明这两个李群的积也还是李群,需要满足李群的两个条件:1.自反性:,2....

反反复复看过很多次,总是有些地方不太明白,希望通过整理,再有一些新的认识。 参考: 李群李代数转换关系 视觉SLAM14讲 第4讲 ... ...群(group)是一种集合加上一种运算的代数结构。把集合记...
推荐文章
- SMT的基本知识介绍_smt行业基础知识-程序员宅基地
- 43.基于SSM的口腔护理网站|基于SSM框架+ Mysql+Java设计与实现(可运行源码+数据库+lw)-程序员宅基地
- HTML中Table表格的使用与漂亮的表格模板_html table 样式-程序员宅基地
- Linkage Mapper中的局部和全局地图比较实践指南(含实例分析)-程序员宅基地
- 线性筛求欧拉函数-程序员宅基地
- 初中几何题_初中几何题解-程序员宅基地
- jQuery 放大镜效果_jquery放大效果-程序员宅基地
- Python构建快速高效的中文文字识别OCR_中文ocr python-程序员宅基地
- SQL语句用case when实现if-else条件逻辑_case when里面可以加if else吗-程序员宅基地
- 数据结构实验课程设计报告求工程的最短完成时间_(1)用字符文件提供数据建立aoe网络邻接表存储结构; (2)编写程序,实现图中顶点的-程序员宅基地