Make sure file exists in package path and permission is set to executable (chmod +x) process[quadrotor_simulator_so3-5]: started with pid [24672] process[so3_control-6]: started with pid [24674] ...
”so3“ 的搜索结果
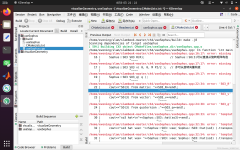
useSophus.cpp:(.text+0xd2):对‘Sophus::SO3::SO3(Eigen::Matrix, 3, 3, 0, 3, 3> const&)’未定义的引用 useSophus.cpp:(.text+0xf5):对‘Sophus::SO3::SO3(double, double, double)’未定义的引用 useSophus....
视觉14讲 ch4 Sophus库安装及代码修改 Sophus库安装: git clone https://github.com/strasdat/Sophus.git cd Sophus git checkout a621ff mkdir build cd build cmake .. make sudo make install ...运行完
转载自...首先是cmakelists: cmake_minimum_required( VERSION 2.8 ) project( useSophus ) 为使用 sophus,您需要使用find_package命令找到它 find_package( Sophus REQUIRED )...

本系列文章为原创,转载请注明出处。 作者:Tom Bai 邮箱: [email protected]若您觉得本博文对您有帮助,请您为我点赞并关注我,以鼓励我写出更优秀的博文。谢谢!一、Sophus库简介:Eigen库是一个开源的C++...
TGK-planner编译报错解决。
Sophus介绍

《自动驾驶与机器人中的SLAM技术》深蓝学院第三章习题 惯性导航与组合导航
【代码】python SO3 & so3 BCH近似计算。
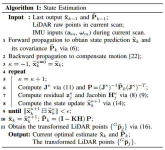
第三节课习题 深蓝学院SLAM课程团队 2018 年 3 ⽉ 5 ⽇ 1 习题说明 • 第 i 节课习题所有材料打包在 Li.zip 中,∀i = 1…8。 • 习题分为若⼲种:计算类习题,需要读者编程计算⼀个实际问题,我们会附有参考答案以...

环境:ubuntu20.04 1.修改 CMakeLists.txt 文件, 1.将 c++11 修改为 c++14。这一步主要看你的系统支持哪个 c++ 标准,我的是 ubuntu20.04,所以修改为 c++14。 2.修改 eigen 库的路径,这一步需要查看自己的 eigen ...
Sophus库链接错误
标签: 学习方法
试了很多方法,还是这个有效果。
.5 sophus的使用 书中提供的代码 useSophus.cpp #include <iostream> #include <cmath> #include <...#include "sophus/so3.hpp" using namespace std; using namespace Eigen; int main(int
第一部分:SO(3)和so(3) 1、SO(3)对应的李代数 SO(3)对应的李代数是定义在上向量,我们记作。根据上一篇博客中的推导,可以知道,每个都可以生成一个反对称矩阵: 在此定义下,两个向量的李括号(运算)为: ...
在这个例子中,我们首先构建了一个SE(3)位姿T1,然后对其进行逆运算、乘法运算,最后将旋转矩阵和李代数相互转换。此外,还演示了如何将两个李代数相加。总的来说,Sophus库提供了一组简单而强大的工具,可以大大...
预积分代码实现

SO3代表旋转矩阵,SE3代表欧式变换矩阵,so3代表一个三维的表示旋转的向量,se3代表一个六维的表示欧式变换的向量(这并不恰当,但是如果只是想用理解到这里就可以了) SO3、SE3和so3、se3一一对应(限定旋转在360度...
lsd-slam源码解读第一篇:Sophus/sophus所谓slam即Real-time Simultaneous Localization and Mapping,实时定位与地图重建,lsd是一个大规模的单目视觉半稠密slam项目,优点和前景我就不多说了,做机器人和AR的朋友们...
/home/safsafsa/projects/usesophus/usesophus.cpp:15: undefined reference to `Sophus::SO3::SO3(Eigen::Matrix<double, 3, 3, 0, 3, 3> const&)' /home/safsafsa/projects/uses...
高翔原视频是ubuntu14.04,看了一下,有很多库都有兼容问题,所以初步按这个Ubuntu 20装:这个教程是ubuntu20的,用ubuntu14会不兼容,比如qt5.12.12无法安装等(需要5.12.3)。和我之前安装的主要区别:之前用的是非...
fftSO3-MATLAB
标签: MATLAB
fftSO3-MATLAB
视觉SLAM学习:Sophus库中 SO3和SE3的使用方法视觉SLAM学习:Sophus库中 SO(3)和SE(3)的使用方法一、SO(3)的使用方法1.1 构造1.2 李代数用法1.3 增量扰动模型的更新二、SE(3)的使用方法2.1 构造2.2 李代数用法2.3 ...
推荐文章
- 【备忘】Vue.js 2.5 + cube-ui 开发到部署e了吗实战-程序员宅基地
- 08jsp技术--动作元素-程序员宅基地
- Linux 编译RXTX(JAVA串口开发)源码_修改rxtx源码-程序员宅基地
- Basic身份认证攻击_基于basic authentication认证弱口令-程序员宅基地
- 解决windows管理员被禁用,登录不了系统的情况(也可用于普通用户无法解禁管理员登录)_安全模式可以登陆管理员账户 普通模式无法选择账户-程序员宅基地
- 用Meshlab处理pcd点云数据(pcd转ply;Meshlab载入.ply失败,Error details:Unespected eof)_ply error details: unexpected eof-程序员宅基地
- iOS swift present出UINavigationController然后present_ios present uinav-程序员宅基地
- 渐变_渐变分为什么和什么?-程序员宅基地
- 图像频率域分析之傅里叶变换_研究傅里叶时域图像时频率是不变的吗-程序员宅基地
- Linux(1)---文件搜索命令_wheresliyuan-程序员宅基地