磷酸萃取过程SO3含量软测量仪表的开发与应用zip,磷酸萃取过程SO3含量软测量仪表的开发与应用 相关下载链接://download.csdn.net/download/weixin_38743968/11975017?utm_source=bbsseo
”so3“ 的搜索结果
在 `main` 函数中,首先初始化了 Google 的日志系统,并解析了命令行参数。接着,代码将角速度从角度制转换为弧度制,并初始化了一些变量,包括物体的位姿(`pose`)、角速度矢量(`omega`)和本体系速度(`v_body`...
slam十四讲第四讲李群李代数

搭建一个slam系统
orb_slam3测试农业数据集

深蓝学院高翔《自动驾驶与机器人中的SLAM技术》第四章作业 预计分原理
在夸克3.0之前个人觉得夸克是最好的浏览器之一,轻便快捷高效。 但至3.0之后夸克越来越臃肿卡顿,之后试用过夸克其他各种修改版以及UC turbo(海外版夸克)修改版等,在使用过程中都存些问题,比如简繁字体显示、...
-- This is a VHDL code for a 4-bit adder -- The code defines an entity named "adder_4bit" with 9 input ports and 5 output ports -- The entity uses 4 instances of a component named "adder_1bit" to ...
使用Sophus库进行SO(3)、SE(3)的指数映射、对数映射、反对称矩阵获取等
从零开始手写VIO 第一章 概述与课程介绍 课程代码: 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 参考博客: ...2.李群、李代数、左扰动、右扰动复习回顾:视觉SLAM十四讲:李群李代数 1.VIO 文献阅读 ...

Sophus 李群 --[SO3]_luoshi006的博客-程序员宅基地 一、理论 相机旋转——>旋转矩阵相乘——>李群的乘法(李群是无约束的)——>李代数的加法 对李代数的求导 二、程序 十四讲中的程序 1. eig
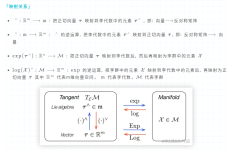
一、变换规则 对于三维旋转theta*a是向量fai 对于三维变换,左上角的R仍然是相同公式,右上角J由新公式给出
李群与李代数

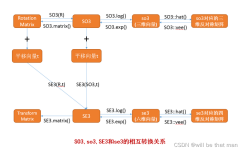
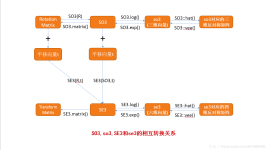
本程序演示了sophus库基本使用方法 一.介绍 Sophus支持三维运动的SO(3)、SE(3),此外还支持二维运动的SO(2)、SE(2)和相似变换Sim(3)等内容。它是直接在Eigen库基础上开发的。 * 二....1.SO(3)、so(3)、SE(3)、se(3)定义...
Sophus连接发生错误**
标签: 自动驾驶
在利用cmake 进行编译的时候发生了如下所是的错误 Scanning dependencies of target usesophus [ 50%] Building CXX object CMakeFiles/usesophus.dir/useSophus.cpp.o [100%] Linking CXX executable usesophus ...
二、slambook编译调试 slambook-master/ch2 编译正常,log如下: slambook-master/ch2# mkdir build && cd build && cmake .....-- The C compiler identification is GNU 9.4.0 ...
ORBSLAM3 --- 优化(一):g2o优化中的节点与边的定义-G2oTypes.h、G2oTypes.cc解析
功能化离子液体中氢键的理论研究
标签: 首发论文
功能化离子液体中氢键的理论研究,宋志祥,王海军,在本工作中,运用密度泛函理论在B3LYP/6-311++G**条件下,对功能化离子液体[C3SO3Hmim]HSO4中的氢键进行了研究。研究的结果发现,在这种离�
更新误差先验F通过3.42来算得到F其中, F中的名义状态的推进通过公式3.41得到,(名义状态不考虑误差, 这一点从3.41d, 3.41e可以看出, 误差状态只考虑误差, 真实状态为名义+误差)代码的实现333333333333Q的算法注意, 在...
SLAM十四讲ch4代码调整 代码新环境下的调整——2021.6.9 ...2.同样因为时模板类的Sophus,源码中的所有Sophus::SO3都需要声明为Sophus::SO3d 或者 Sophus::SO3. Sophus::SO3<double> 3.Sophus::SO3

Make sure file exists in package path and permission is set to executable (chmod +x) process[quadrotor_simulator_so3-5]: started with pid [24672] process[so3_control-6]: started with pid [24674] ...
推荐文章
- com.netflix.discovery.shared.transport.TransportException: Cannot execute request on any known serve-程序员宅基地
- PAT乙级练习题1010 一元多项式求导_pat 乙级 1010-程序员宅基地
- You can also run `php --ini` inside terminal to see which files are used by PH P in CLI mode_you can also run `php --ini` in a terminal to see -程序员宅基地
- 对UDP校验和的理解_udp 数据包 校验和 checksum=0-程序员宅基地
- 递归遍历文件夹,以c:/windows为例-程序员宅基地
- git 本地与远程的链接_git如何本地和网页链接-程序员宅基地
- ArrayList与HashMap遍历删除元素,HashMap与ArrayList的clone体修改之间影响_在arraylist和hashmap遍历的同时删除元素,可能会导致一些问题发生-程序员宅基地
- Chapter2-软件构造过程和生命周期_iterative and agile systems development lifecycle -程序员宅基地
- 4.6 浮动定位方式float_c语言中float的左右浮动属性示例-程序员宅基地
- OSS上传【下载乱码问题】_阿里云oss文件名乱码-程序员宅基地