”ros“ 的搜索结果
一,首先安装ros对qt pkg的支持 sudo apt-get install ros-melodic-qt-create sudo apt-get install ros-melodic-qt-build 这样就能通过:catkin_create_qt_pkg命令创建ros gui包了: 在src目录下创建包: catkin_...
【奥特学园】ROS机器人入门课程《ROS理论与实践》零基础教程P315- 【以上视频笔记见http://www.autolabor.com.cn/book/ROSTutorials/】 前文参考: ROS入门(九)——机器人导航一(介绍、地图、定位和路径规划) ...
容器解决方案:Snaps 将您的所有依赖项和资产捆绑在一个包中(包括 ROS),使您的应用程序可安装在数十个 Linux 发行版和跨发行版版本上。 严格限制:Snaps 被设计为安全且与底层系统和其他应用程序隔离,具有访问...
在拿相机玩ORB-SLAM3时涉及到了ROS topic的收发与时间同步问题,而且在得到相机位姿后还需要将位姿信息封装成一定的消息格式发布出去,这就又涉及到自定义消息的使用。以往只是在代码中改改相应的topic的名称就直接...
ROS Melodic版本在2018年5月23日推出正式版,这是ROS第三款长期支持版本,前2版LTS分别为:indigo(14.04);kinetic(16.04)。此版本有windows版已经推出,无需更换Linux,一小时安装完成: Windows使用ROS机器人操作...

ROS(Robot Operating System),开源机器人操作系统,是一个机器人软件平台,能为异质计算机集群提供类似操作系统的功能。本文首先介绍ROS平台,并在后续博客中介绍ROS的安装以及基本使用方法
介绍 ROS2 eloquent版本在EHub_tx1_tx2_E100载板,Jeston TX1 核心模块,JetPack_4.6.3刷机后, ubuntu18.04 环境下介绍和学习Parameters和命令行下的相关操作。

基于20.04版本Ubuntu对应的ROS版本Noetic安装全过程
如果您的系统安装了anaconda,同时也安装了ROS,如何协调它们的环境,因为ROS安装后,默认要安装一个python而非anaconda,如何处理?
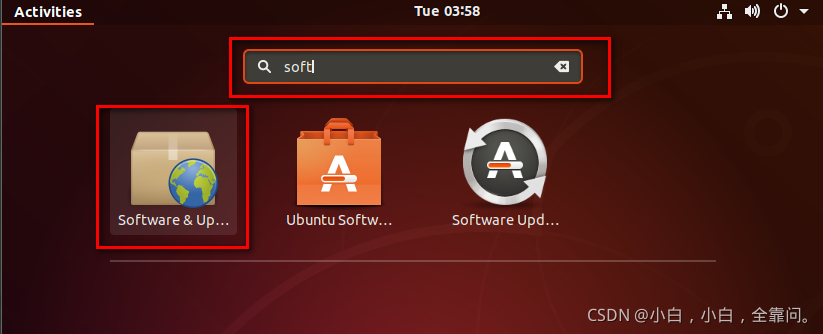
哔哩哔哩的课进视频的《『ROS 入门 (一)』什么是ROS?| 虚拟机安装配置 | ROS安装 》 1、设置ubuntu的环境配置 1、首先需要进行联网,需要联网、需要联网。重要的事情说三遍。 2、按下win键,输入soft,点击...

Rosservice call service_name arg1 arg2…… 我们如何可以实现像rostopic pub topic_name topic_type: “arg1_name:arg1……”那样在命令行发布消息,rosservice call可以帮我们做到: 输入完topic_type后,...

ROS简介

本文主要讲解下,ros::spin()和ros::spinOnce()的使用细节,以及他们的区别。
简介:在前面的章节中,我们先简单学习了ROS2的话题发布和订阅,两种操作都是通过python代码实现的,而在实际应用过程中,我们会经常用到命令行操作来辅助调试,更进一步的可以使用GUI工具辅助调试,比如前边用到的...

当你在Ros中开发完成,想要导入系统验证功能的时候,是不是苦于需要去Ros,但是去了Ros又没法使用很多很好用的工具,如rviz、rosbag等。调试起来费心费力,如果在非ros平台开发一套可视化、记录工具等又是庞大工程。...

ROS Melodic 安装必成功流程+避坑指南(超详细) 现在的机器人越来越火,市场上的需求量越来越高,我们要学习如何更快速的搭建机器人系统,来为我们的开发助一臂之力,下面介绍一种必成功的安装 `ROS` 的方式。

机器人操作系统(ROS)简介1.ROS基本概念2.ROS架构2.1OS层2.2中间层2.3应用层3.通信机制4.计算图4.1节点(Node)4.2节点管理器(Master)4.3消息(Message)4.4话题(Topic)4.5服务(Service)4.6动作(Action)4.7...
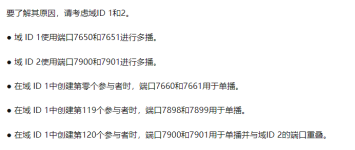
我们都知道ROS2比ROS1好很多,就比如说: 去中心化master,ROS和ROS2中间件不同之处在于,ROS2取消了master节点。在去中心化后,各个节点之间可以通过DDS的节点相互发现,各个节点都是平等的,且可以1对1、1对n、n...

本篇博客主要介绍ROS系统的录制与回放功能,ROSBAG功能包,从命令行指令和C++编程两个角度完成对于数据录制与回放的功能。

将消息导入Unity的步骤如下所示Unity的菜单“Robotics→Generate ROS Messages…”选择。在“ROS message path”中选择“catkin_ws/src”。然后就可以看到path下的msg都会显示在Unity下面然后点击“MyString.msg”中...
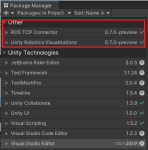
本篇文章主要介绍基于ROS-TCP-Connector、ROS-TCP-Endpoint两个Unity接口与ROS进行通信的环境配置,并对官方给出的Unity和ROS相互通信示例中的消息部分做了说明。
公众号:鱼香ROS QQ交流群:139707339 教学视频地址:小鱼的B站 完整文档地址:鱼香ROS官网 版权声明:如非允许禁止转载与商业用途。 2.3 安装ROS2 到了这一节,终于可以开始安装ROS2了。小鱼接下来会讲的比较细...
https://blog.csdn.net/shanpenghui/article/details/117282535 https://blog.csdn.net/weixin_37532614/article/details/109602947 https://blog.csdn.net/weixin_41010198/article/details/117042386

ROS2与ROS1之间的通信--ros1_bridge
本文介绍了基于强化学习的turtlebot3自主导航学习环境,包括openai_ros的安装以及以其为基础创建自己的强化学习任务环境。
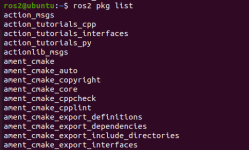
在ROS中,有许多常用的基本命令可用于管理ROS软件包、构建和运行ROS应用程序,以及处理ROS数据流。请注意,这只是ROS命令的一小部分,ROS还有许多其他命令和工具可供使用。您可以使用该命令来查找、列出、验证和获取...
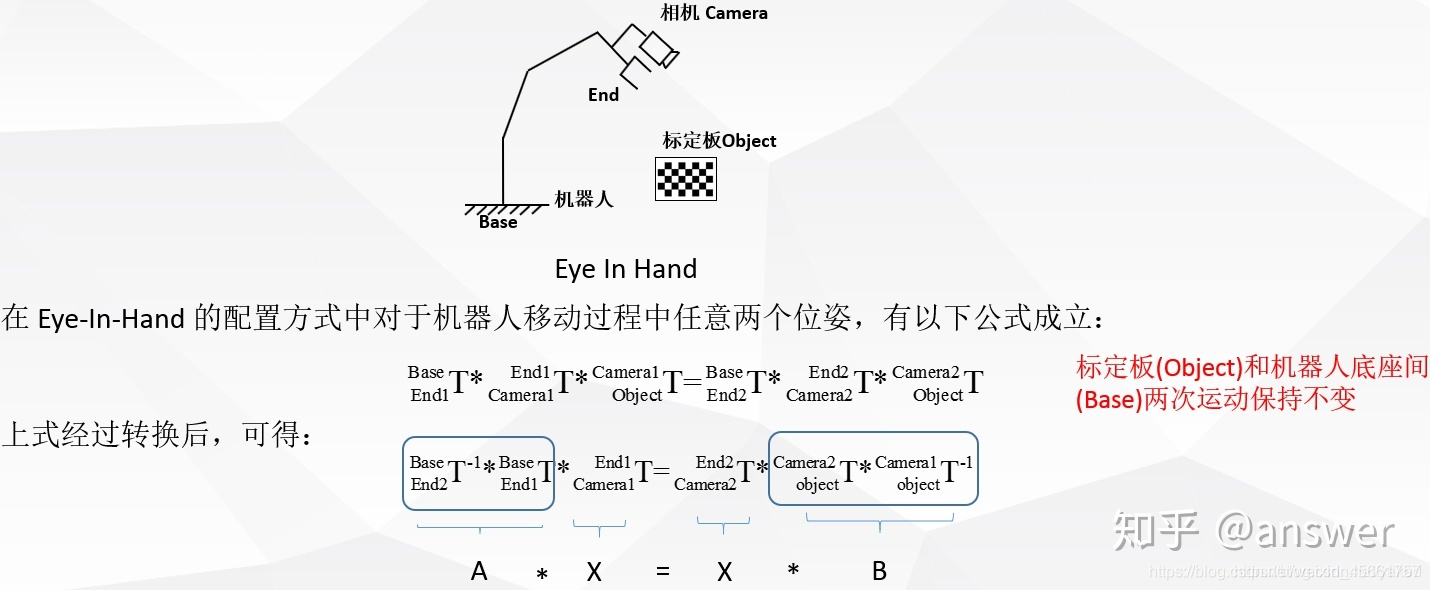
ROS机械臂视觉抓取 一、总述 视觉抓取主要是通过改变机器人的tool坐标系或base坐标系来实现的。物体位置的变化主要是它位置的X,Y,Z 方向的变化。而base坐标系可根据需要定义用户坐标系。当机器人配备多个工作台时,...
ROS2的每个版本都有其特点和改进。
Visual Studio Code,简称VSCode,是微软在2015年推出的一个轻量但功能强大的源代码编辑器,支持 Windows、Linux和 macOS操作系统,扩展组件非常丰富,可以快速搭建成为项目开发的神兵利器。

本篇文章记录在安装ROS时碰到的rosdep update超时问题,并记录了为解决这个问题我所尝试的解决方法。相关环境为Ubuntu20.04,ROS Noetic。