文章目录1. Controllers2.... gazebo_ros_control添加传动系统添加gazebo_ros_control插件默认gazebo_ros_control行为自定义gazebo_ros_control插件 1. Controllers sudo apt-get install ros-me
”ros“ 的搜索结果

ROS知识【10】:ROS通信
标签: 人工智能


ROS搭建基于Linux版本: Ubuntu 18.04 LTS首先需要安装虚拟机和Linux操作系统,安装过程参考百度目录:一、ROS基础ROS常用关键词文件系统的概念二、环境搭建快速安装分步安装三、ROS初体验ROS串口通信主机topic通信四...
【ROS教程】ROS常用命令
ROS Bag可以将ROS节点发布的消息记录下来,然后在需要的时候将这些消息再次播放回ROS系统中。它可以记录指定主题的消息,将消息保存到一个ROS Bag文件中。2.在ROS程序中使用ROS API来记录消息,将消息保存到ROS Bag...
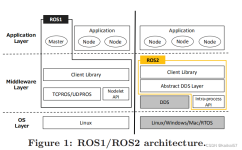
ROS 是 Robot Operating System 的缩写,通常称为“机器人操作系统”。但它并不是一个真正的操作系统,而是一个面向机器人的开源的元操作系统(meta-operating system),提供类似传统操作系统的诸多功能:硬件抽象...
Ubuntu和ROS版本对应关系及官方支持结束时间,加粗的为还在支持的版本。 Ubuntu ROS End of Life 14.04 LTS indigo lgloo April, 2019 16.04 LTS Kinetic Kame April, 2021 18.04 LTS Melodic Morenia ...

ROS2安装教程,Foxy安装教程,在Ubuntu下安装ROS2




ROS 2 Foxy 安装手册和踩过的坑官方流程准备工作魔术工具更换国内源安装前提系统要求安装选择安装流程设置语言区域设置源安装ROS2包环境配置验证样例参考 之前写过一篇18.04下安装ROS2E的手册,最近要用Moveit2了,...
ROS话题的订阅与发布
标签: ubuntu
文章目录前言一、新建一个ROS工作空间并创建功能包二、创建一个msg消息三、发布话题四、订阅话题 前言 Ubuntu18.04 ROS Melodic 一、新建一个ROS工作空间并创建功能包 mkdir -p catkin_ws/src cd ~/catkin_ws/src/ ...
ROS基本操作 ROS中订阅节点消息测试 ROS下如何订阅任意话题
ROS消息发布与订阅实践及C++代码详解

ROS 机器人程序设计-源代码
标签: ROS
ROS 机器人程序设计-源代码, 方便大家不必再到外国网站下载了,为了自己能下载一些资源,无奈收大家一分,见谅。


在Ubuntu系统中安装Ros

在ros2下使用ros1_bridge与ros1自定义消息桥接 示例环境 操作系统:ubuntu 20.04 amd64 ros版本:noetic ros2版本:foxy


推荐文章
- 【ATL03学习】-程序员宅基地
- Django内置email发送邮件-程序员宅基地
- error C2660: “MessageBoxA” : 函数不接受 1 个参数-程序员宅基地
- LVS的nat模式连接超时及无法连接主机排错总结-程序员宅基地
- 基于CubeMX-STM32 驱动 WS2812B(__nop()函数方式)_stmcubemx stm32l051c8 io口驱动ws2812b-程序员宅基地
- 看完这篇,你应该知道什么是Linux了~_看完这篇 你应该就知道什么是linux-程序员宅基地
- minio用生成的预签名上传链接上传文件报SignatureDoesNotMatch,The request signature we calculated does not match the si_x-amz-credential minio-程序员宅基地
- Android 低功耗蓝牙 不回调onServicesDiscovered_discoverservices()没反应-程序员宅基地
- linux ld.so.conf,ld.so.conf.d配置文件-程序员宅基地
- C# Winform发送HTTP请求-程序员宅基地