
”orb“ 的搜索结果

VI_ORB_SLAM2:基于ORB-SLAM2的单目/立体视觉惯性ORB-SLAM 该存储库包括Visual-Inertial ORB-SLAM的Monocular版本和Stereo版本。 这两个是的和的。 有关详细信息,您可以参考Examples/Monocular/mono_euroc_VI.cc和...
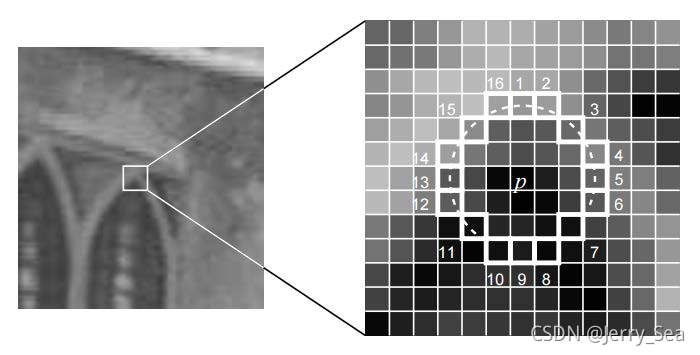
一、介绍 假如有两张人物图片,我没的目标是要确认这两张图片中的人物是否是同一个人。如果人来判断,这太简单了。但是让计算机来完成这个功能就困难重重。一种可行的方法是: ...ORB(Oriented FAST and Rotate
绪论 假如我有2张美女图片,我想确认这2张图片中美女是否是同一个人。这太简单了,以我专研岛国动作片锤炼出来的火眼金睛只需轻轻扫过2张图片就可以得出结论。但是,如果我想让计算机来完成这个功能就困难重重了:...
Opencv 之ORB特征提取与匹配API简介及使用例程
ORB-SLAM2 ORB-SLAM2 作者: 、 、 和 ( )。 原始实现可以在找到。 ORB-SLAM2 ROS 节点 这是用于单目、立体和RGB-D相机的 ORB-SLAM2 实时 SLAM 库的 ROS 实现,用于计算相机轨迹和稀疏 3D 重建(在具有真实比例的...
C++开发基于LK光流法代替ORB-SLAM2中的特征点提取匹配法来跟踪关键点源码+使用说明.zip C++开发基于LK光流法代替ORB-SLAM2中的特征点提取匹配法来跟踪关键点源码+使用说明.zip C++开发基于LK光流法代替ORB-SLAM2中的...
ORB-SLAM2(中文注释版) 评论员: 作者: , , 和 ( ) 2017年1月13日:现在支持OpenCV 3和Eigen 3.3。 2016年12月22日:添加了AR演示(请参见第7节)。 ORB-SLAM2是用于单目,立体声和RGB-D相机的实时SLAM库...
针对目前视觉SLAM(同时定位与地图构建)系统只能输出相机的运动轨迹图而不能生成用于路径规划和导航地图的缺点,提出了一种基于ORB-SLAM2的网格地图实时构建算法。首先,建立了一个适用于视觉SLAM的逆传感器模型...
ORBSLAM3_docker 构建ORBSLAM3时遇到错误。 在安装ROS之前,我能够修复该错误,并以某种方式完成了相关性。 来自原始代码安装前要求(1)码头工人(2)NVIDIA泊坞窗使用dockerfile安装ORBSLAM3 运行build_docker.sh...
orb算法matlab代码Loblaws Digital-开发人员带回家进行作业-基于相似度对图像进行排名 目录 介绍 对于此任务,我的目标是制作一个工具,该工具可以比较2张图像的相似度并相应地对其进行排名。 这是一个开放式的任务...
Osmap:ORB-SLAM2地图序列化 OSMAP代表Orb-Slam2地图。 这是ORB-SLAM2的序列化附录。 ORB-SLAM2是一种可视化SLAM,可从视频流生成点云(某种)地图,因此可以将自身定位在该地图中。 GitHub ar上的ORB-SLAM2代码为...
orb算法matlab代码资料夹说明 有许多计算机视觉的基本算法,可以在MATLAB或Python-OpenCV中实现。 可以下载或查阅它们以进行理解。 很少有开发的算法可以满足EE5731视觉计算课程(新加坡国立大学)的要求。 MATLAB...
Tello_ROS_ORBSLAM 在本项目中,我们提供了一个完整的,完整的框架,可用于一般情况下使用Drones以及DJI Tello规范。 在此项目中,您将找到一个GUI,该GUI将允许您控制Tello并命令它在x,y,z,俯仰,滚动,偏航...
orb算法matlab代码OpenCV项目 用C ++编写的计算机视觉程序。 所有项目都有一个跨平台的CMakeLists.txt ,所有这些都在根文件夹的子目录中添加CMakeLists.txt来查找OpenCV并在一个地方共享通用代码。 为了做出贡献,...
此资源包里包括ORB_SLAM2算法源码以及发布位姿信息所需要的文件,以及对应的文件正确的放置位置。仅供参考。
ORB_SLAM3官方标定文档的中文版
分别用SIFT、SURF、ORB做特征匹配要求用绿色线条画出两张图对应的匹配点(出3张图) 再使用RANSAC滤除离群点(参数自行调优)后用绿色线条画出两张图对应的匹配点(出3张图) 然后根据对应点分别计算图B到图A的单应...
ORB-SLAM3原文
ORB算法的MATLAB实现
标签: 图像匹配
ORB算法的MATLAB实现
ORB_SLAM3源码(附带详细注释)
RGBD-inertial mode and its ROS interface was added to ORB_SLAM3. Two ROS interfaces Mono_inertial and Stereo_inertial were provided. Modified the loading vocabulary in a faster binary way. ORB_SLAM3-...
ORBSLAM3线程分解【小白轻松入门版】(1)1
实现步骤:...
ORB-SLAM 2跑通自己的数据集一 、拍摄视频并转化为图片:二、准备索引目录文件:三、生成自己的参数配置文件TUM.yaml。复制TUM1.yaml,并修改参数即可。四、ORB-SLAM2所在的目录并运行如下命令即可:五、本次实验...
ORB-SLAM3 V0.4:Beta版,2021年4月21日 作者:卡洛斯·坎波斯(Carlos Campos),理查德·埃维拉(Richard Elvira),胡安·J·戈麦斯·罗德里格斯(Juan J.GómezRodríguez),( ,( 。 描述了每个版本的功能...
仅使用pcl构建ORB_SLAM2模式 mkdir build cd build cmake .. make -j 跑步: ./run/rgbd_tum Vocabulary/ORBvoc.bin path_to_settings path_to_sequence path_to_association 修改内容: 添加一个具有闭环功能...
Opencv+VS C++实现ORB算法
推荐文章
- 大数据和云计算哪个更简单,易学,前景比较好?_大数据和云计算哪个好-程序员宅基地
- python操作剪贴板错误提示:pywintypes.error: (1418, 'GetClipboardData',线程没有打开的剪贴板)...-程序员宅基地
- IOS知识点大集合_ios /xmlib.framework/headers/xmmanager.h:66:32: ex-程序员宅基地
- Android Studio —— 界面切换_android studio 左右滑动切换页面-程序员宅基地
- 数据结构(3):java使用数组模拟堆栈-程序员宅基地
- Understand_6.5.1175::New Project Wizard_understand 6.5.1176-程序员宅基地
- 从零开始带你成为MySQL实战优化高手学习笔记(二) Innodb中Buffer Pool的相关知识_mysql_global_status_innodb_buffer_pool_reads-程序员宅基地
- 美化上传文件框(上传图片框)_文件上传框很丑-程序员宅基地
- js简单表格操作_"var str = '<table border=\"5px\"><tr><td>序号</td><-程序员宅基地
- Power BI销售数据分析_powerbi汇总销售人员业绩包括无销售记录的人-程序员宅基地