”VIO“ 的搜索结果

代码解读3.1 前端 ImageProcessor3.2 后端 Msckf-Vio 1.算法简介 Mingyang Li博士于2007年提出MSCKF (Multi-State Constraint Kalman Filter),一直是filter-based SLAM的经典之作.据说这也是谷歌tango(室内外手机...



VIO滑窗中的FEJ算法理解
标签: 算法

(1)ILA Com、ICON Core和VIO Core可以作为一个IP Core插入到设计巾,运行ISE lO.1Navigator,打开设计文件. (2)为建立XCO文件,选择【Project】-【New Source】命令,弹出【New Source Wizard】对话挺。选择...

在hi3559av100平台上通过vi获取视频,然后通过opencv实现柱面投影算法,然后输出到hdmi接口。主要是将hi3559的c语言版本开发demon和opencv的c++版本代码集成到一起对初学者是个稍微麻烦点的事情,高手请忽略。

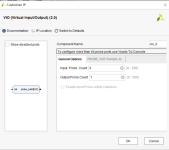
VIO(Virtual Input/Output)有两个主要功能 监测设计中的内部信号; 驱动设计中的内部信号。 既然是Virtual(虚拟的),就表明这个输入或输出并不是真实存在于FPGA设计中。下图显示了VIO的输入、输出管脚。其中...

在增量VIO中加入结构化特征1
VINS-FUSION代码超详细注释(VIO部分)/VIO入门(1)讲到了主程序rosNodeTest.cpp。在程序最后,会进入sync_process线程进行处理。本篇博客接着进行讲解。 VINS-FUSION代码超详细注释(VIO部分)/VIO入门(2...
全网独创,使用ila逻辑分析仪和虚拟输入输出控制vio, 并以BD形式实现,以zedboard为开发板,使用vivado2018.3 任意波形发生器,作者花了几天时间亲自编程调试,非网上抄袭,系独创作品
视觉惯性里程计(VIO)和视觉轮里程计的MATLAB仿真_MATLAB_源码_下载.zip
VIO使用视觉里程计(visual odometry)从相机图像估计机身姿态,同时结合机身IMU或着飞控IMU惯性测量,来校正快速移动造成的图像不良问题。 px4并不关心定位信息的来源,VIO信息友ROS传递到PX4 ROS/VIO安装 1、安装和...
视觉SLAM理论与实践进阶-手写VIO-概述-附代码链接一、VIO文献综述二、四元数和李代数更新三、 导数公式的推导 一、VIO文献综述 1.1 视觉与IMU进行融合之后有何优势? 答: 1). 纯视觉 SLAM 容易受图像遮挡,光照...

一个可以使用的RocketI/O开发实例。基于Xilinx FPGA Virtex5平台。

点击上方“AI算法修炼营”,选择加星标或“置顶”标题以下,全是干货VINS-mono 论文解读(IMU预积分+Marg边缘化)前面,我们已经对接下来的VIO系列主要内容有所介绍(感兴趣的...

一、前言 这篇文章作为我的硕士期间学习总结,将从导航定位层面介绍SLAM技术,并给初学者一些学习建议。不会涉及非常深的理论方面的东西,初衷是重点说清楚SLAM方法的应用价值和学习方向,笔者认为这个对初学者...
这就需要我们添加一个VIO ,下载完代码以后,触发VIO 产生一个使能信号,用该使能信号做逻辑触发,抓取时序波形。 将上述IP核生成好,添加到代码中。测试的时候,输出默认是0,运行VIO 以后输出1 。用1 ...


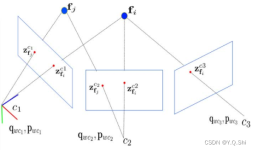
文章目录前言·与同主题博文的不同1.证明式(15)1.1对公式(15)的说明1.2推导过程2.请依据本节课公式,完成特征点三角化代码,并通过仿真测试2.1理论依据2.2代码及仿真结果3.请对测量值加上不同噪声(增大测量噪声...
推荐文章
- 什么是ABA问题及ABA问题的解决方法。-程序员宅基地
- muduo库的Singleton类剖析_muduo网络库中的sinleton类是干嘛的-程序员宅基地
- attach java_【JAVA新生】nio attach引发的问题-程序员宅基地
- 位掩码(bitmask)在windows 串口事件驱动中的应用_windows返回bitmask的函数-程序员宅基地
- 【STL】stack & queue & priority_queue {栈,队列,优先级队列的介绍及使用;仿函数/函数对象;容器适配器,双端队列deque}_容器link、队列、栈、优先队列、bitset的使用方法-程序员宅基地
- Java泛型——限制可用类型_java 泛型 限制类型-程序员宅基地
- 冲刺港股IPO,速腾聚创「承压」-程序员宅基地
- C++中istringstream、ostringstream、stringstream详细介绍和使用_c++ istringstream-程序员宅基地
- Java面试之JUC系列: 阻塞队列详细解析_java实现阻塞队列面试-程序员宅基地
- WebUploader 大文件上传解决方案(500M以上)_webuploader 大小限制-程序员宅基地