■ 【Trigger Port Width】文本框:触发端口宽度,最大为256。 ■ 【Match Units】下拉列表框:用于检测触发端口是否满足特定的条件。一个触发端最多可有16个触发匹配单元,匹配单元的类型在 【Match Type】下拉...
”VIO“ 的搜索结果
Xilinx Vivado 硬件诊断( ila和vio的使用),两者的灵活交换使用,基本的调试基本功
一文读懂复杂的VIO初始化
标签: 数码相机
视觉惯性融合技术应用于机器人和自动驾驶方面。...VIO初始化的主要意义有:(1)对齐相机的世界坐标系和惯性系,因此需要估计重力方向(2)为后续的VIO算法提供较为准确的初始参数和状态(尺度、I...




VIO概述 On-Manifold Preintegration for Real-Time Visual--Inertial Odometry 目前的研究方向可以总结为在滤波算法中实现高精度,在优化算法中追求实时性.当加入IMU后,研究方向分为松耦合和紧...
DM-VIO论文翻译
标签: 计算机视觉

中断测试程序,调用vio和lia核,观测中断信号
Vivado VIO IP核定制方法,Vivado仿真工程,VIO IP核定制及参数配置;
R-VIO:以机器人为中心的视觉惯性里程表(IJRR2019,IROS2018)
一、VIO数据类型 VIO是一个数据结构,在include/violite.h中定义的说明中有一句话“This structure is for every connection on both sides.Note that it has a non-default move assignment operator, so if adding...
【深蓝学院】手写VIO第4章--基于滑动窗口算法的 VIO 系统:可观性和 一致性--笔记

集成运放输入失调电压VIO的测试pdf,集成运放输入失调电压VIO的测试
从零开始手写vio- 第5节滑动窗口第5节滑动窗口算法实践

vio 视觉前端 视觉前端

VIO是一个数据结构,在include/violite.h中定义的说明中有一句话“This structure is for every connection on both sides.Note that it has a non-default move assignment operator, so if adding more ...
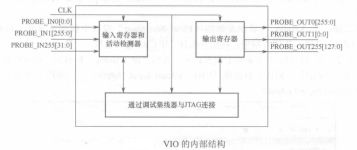
一个数据帧从进入到输出,可以在通路上的关键节点处设置监测如各种计数器等,可通过VIO(xilinx)定时上报实时状态。可以把VIO的各个信号线设置成类似于CPU总线的结构,监测计数器或者状态寄存器编成相应的地址,轮询...
主流VIO技术综述及VINS解析_崔华坤等、ICE-BA论文分析及GBA代码解析、ROVIO论文推导及代码解析_V5_byHK20181018、VINS论文推导及代码解析_可公开_崔华坤_190221_V12
我安装Kimera-VIO-ROS的时间是2023.10.28。由于已经离Kimera发布过去两年,所以遇到版本不同步问题,Kimera-VIO,Kimera-VIO-ROS,GTSAM的版本需要精心挑选。Kimera-VIO在2021.07.01之后没有更新,git commit版本为...

Vivado调用VIO核
标签: fpga开发
推荐文章
- 1N5819-ASEMI轴向肖特基二极管1N5819-程序员宅基地
- 把maven的setting配置文件改为需要jdk版本_<profile> <id>jdk-1.4</id> <activation> <jdk>1.4</-程序员宅基地
- 使用matlab进行DBscan聚类_dbscan聚类分析图用什么软件-程序员宅基地
- 探秘技术新星:BBS_admin - 一个现代化的论坛后台管理系统-程序员宅基地
- 【译】JavaScript 开发者年度调查报告-程序员宅基地
- 神仙级渗透测试入门教程(非常详细),从零基础入门到精通,从看这篇开始!_网络渗透技术自学-程序员宅基地
- 多个protocbuf版本切换_protobuf调整版本-程序员宅基地
- msf+cobaltstrike联动(一):把msf的session发给cobaltstrike-程序员宅基地
- C语言--编写程序,输入一个整数,判断它能否被3,5,7整除_编程序实现功能:输入一个整数,判断其是否能同时被3、5、7整除。能被整除则输出“y-程序员宅基地
- 数据技术之Hadoop(HFDS文件系统)-程序员宅基地