”Ubuntu/ROS“ 的搜索结果
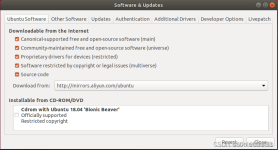
ROS安装时,不同版本所适配的ubuntu版本不同,其他的版本参考官方文档。本文使用ubuntu 12.04,ROS版本为Hydro(适配12.04,12.40,13.04)。配置ROS相关软件源给ubuntu添加ros相关的软件源,一般ubuntu添加第三方源的...
另外,你也需要确认你的系统环境是否满足ROS2-IRON的运行需求...在尝试下载ROS2-IRON Ubuntu-22.0源码时,如果你遇到了下载失败的问题,以下是一些可能的解决方案。你需要将这个地址替换成你需要下载的源码的实际地址。

记录一下ubuntu20.04、ubuntu18.04和ubuntu16.04分别默认的cmake、VTK、eigen、pcl、opencv、qt、ROS、cuda、cudda版本号
ROS


详细介绍如何在ubuntu20.04中安装ROS系统,超快完成安装(最新版教程)_ubuntu安装ros-程序员宅基地
记录运行A-LOAM的过程及遇到的问题解决办法
ros
关于Ubuntu18.04/20.04安装后的一系列环境配置过程的总结
激光雷达和3d视觉传感器驱动很多都是基于ros1开发的,由于自己项目在ros2环境开发,需要获取从驱动出来的点云数据流,所以尝试订阅ros1出来的点云topic话题,固需要ros1与ros2之间建立通讯连接。3)开一个新终端,在...
本文介绍如何在 Ubuntu 22.04(Jammy)上安装 ROS 2 软件包,ROS 2 的版本是当前最新的 Humble Hawksbill。本教程适用于 amd64 和 arm64 平台。
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources/list.d/ros-latest/list' 时,终端显示sh: 1: cannot create /etc/apt/sources/list.d/ros-latest/...
至此,ROS1和ROS2已经同时安装在你的Ubuntu 20.04系统中了。需要注意的是,由于我们将ROS1和ROS2的环境变量都添加到了bash会话中,所以每次打开新的终端,ROS1和ROS2的环境都会被设置。为了避免这种混淆,你可以选择...
这个错误是因为在catkin工作空间中包含了非catkin包,而catkin无法构建非同构的工作空间。你可以尝试使用`catkin_make_isolated`命令来解决这个问题。

1 Ubuntu版本和ROS系统
标签: 机器学习

为了在Ubuntu系统上为Qt配置ROS开发环境,我参考了好多博客,走了不少弯路。为此,将最终办法总结于此,供大家参考

NX+Ubuntu18.04+ROS Realsense(RealSenseD435i )的安装与使用

整理了自己在虚拟机和树莓派4B安装ros遇到的一系列问题和问题解决所参考的一些文章
ubuntu Ros虚拟机镜像,已配置好ROS系统和常用软件,功能包齐全,免去安装烦恼,已经在ros小车上验证通过,有两个版本: 版本一:ubuntu18.04+melodic 版本二:ubuntu16.04+kinetic
E: Failed to fetch http://packages.ros.org/ros/ubuntu/pool/main/r/dists/xenial/main/binary-amd64/Packages 404 Not Found [IP: 2600:3404:200:237::2 80] E: Some index files failed to d...
推荐文章
- 不再以讹传讹,GET和POST的真正区别_有鉴于此,多数服务器出于安全啦、稳定啦方面的考虑-程序员宅基地
- Centos8保姆级安装教程-程序员宅基地
- ural 1433. Diamonds-程序员宅基地
- 嵌入式:ARM内嵌汇编及C和ARM汇编相互调用_arm 内嵌汇编-程序员宅基地
- 15-C++基本算法-贪心法_c++贪心算法-程序员宅基地
- vmware 以uuid绑定共享存储磁盘_vmware 共享磁盘uuid-程序员宅基地
- 手撕计算机网络——网络层(一):概览与路由转发_网络层中如何实现路由分组和数据转发的?-程序员宅基地
- 20231217在Canonical 官网下载ubuntu-20.04.6以及通过rufus-4.3p写入U盘作为安装盘_ubuntu20.04.6desktop下载-程序员宅基地
- malloc的用法和new的区别_new和malloc的区别用法区别-程序员宅基地
- 代码管理平台SVN_svn 代码托管平台-程序员宅基地