前言 最近刚写完开题报告,然后在研究局部导航避障算法DWA和TEB这来这两种算法的原理和区别。DWA ROS中自带,而TEB算法需要自行安装下载和配置,以下是我配置的步骤。 ...3.将turtlebot3局部避障算
”Turtlebot“ 的搜索结果
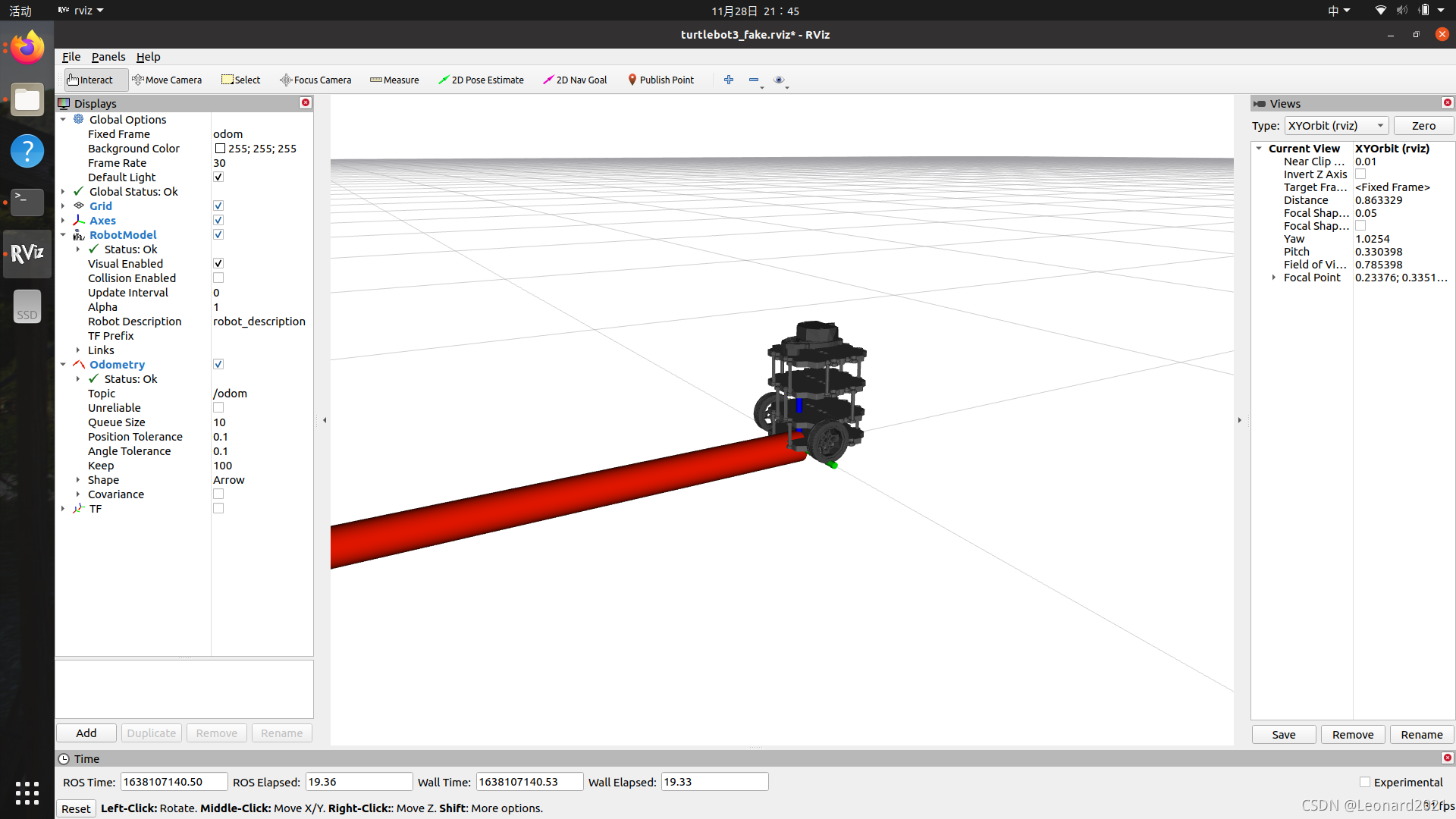
成功解决ROS报错RLException: [turtlebot3_fake.launch] is neither a launch file in package [turtlebot3_fake] nor is [turtlebot3_fake] a launch file name。
在最初以epuck为例,介绍了一些基本知识点,本节将以turtlebot3为主! 从epuck到turtlebot3! turtlebot系列是ROS最强的教学机器人。 那熟悉的感觉又回来啦!!! 注意事项,环境一定要正确配置,官网介绍非常...

Turtlebot2+Ubuntu18.04+melodic环境配置 由于自己的电脑已经安装Ubuntu18.04+melodic,所以为了省事想在不重新安装系统的情况下安装配置Turtlebot2的环境,但是ros官方并为提供turtlebot2的melodic版本,所以在参考...
可以再gazebo中实现沿墙算法,颜色检测以及路径规划等功能

一、仿真环境搭建 1、models模型 可惜选择github下载,搜索gazebo_models。网速不好,百度gitee下载: ...type=repository&q=gazebo_model&repo=&...2、加载turtlebot模型世界并建图 roslau
TurtleBot3 命令行
标签: c++
roslaunch turtlebot3_fake turtlebot3_fake.launch 键盘控制行走: roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch Gazebo仿真:(提前安装仿真包) mkdir -p ~/.gazebo/models/ cp -r ~/catkin_...
TurtleBot4快速入门教程-基本检测
9. turtlebot仿真(利用karto) 参考链接 https://blog.csdn.net/qq_40078576/article/details/104773668 https://blog.csdn.net/lingchen2348/article/details/79503970 9.1. 安装Gazebo仿真软件 安装ros时已经安装...
海龟机器人_android 为turtlebot 开发Android 应用程序。

本项目为图书馆云机器人自动取书系统。 用户通过在浏览器端发起取书任务,机器人即可自动出发前往对应的书架位置取书。... 本项目基于 Ubuntu 16.04 LTS + ROS kinectic + Turtlebot3 + gazebo 7.11 模拟实现。
没有真实小车的情况下,利用gazebo的仿真,操作小乌龟来学习ros2。废话不多说,直接上命令。
使用turtlebot3的ros包,通过自己在urdf中在turtle前端添加相机,利用opencv在gazebo中实现巡线,并实时显示相机视野并且把道路处理结果显示,适合学生作业。

实验四创建仿真环境(1)利用gazebo的Building Editor创建一个简单的仿真环境。(2)打开rviz,加入机器人模型、点云和雷达信息。rviz中的白线为雷达信息。(3)随着机器人的移动,点云信息和雷达信息也随之更新。...
在虚拟机Ubuntu22.04中安装了ROS2(humble),下载turtlebot3。在编译的过程中turtlebot3_Fake_node一直失败,无法正常运行,影响后面的仿真测试。
Arm 源 https://blog.csdn.net/u010953692/article/details/77715865 Ros ...

【Turtlebot2】Turtlebot2+kinect2环境配置 上一篇博文我们已经介绍了如何在ubuntu18.04+melodic下配置turtlebot2的kobuki底盘,这一篇我们将介绍在上面的基础上配置kinect2。 1.安装kinect2驱动 #下载libfreenect2...

最近在学习Cartographer框架,没有真实小车,想着就在模拟器里跑,我们在学习初期,可以运用官方提供的Turtlebot3模型来进行进行建图,先能跑起来,再细看源码。废话不多,直接上命令。因为目前正在看Cartographer...


ROS机器人操作系统为什么现在火爆全球?ROS(Robot Operating System,机器人操作系统)是目前世界上更主流更多人使用的机器人开源操作系统。它可以提供操作系统应有的服务,包括硬件抽象,底层设备控制,常用函数的...
ros2与turtlebot3仿真教程-安装ros2
代码来自turtlebot3_qdn/environment_stage_4.py 发布话题:cmd_vel 订阅话题:odom 服务话题: gazebo/reset_simulation,gazebo/unpause_physics gazebo/pause_physics\ def: getGoalDistace(计算获得目标距离): ...
推荐文章
- Android RIL框架分析-程序员宅基地
- Python编程基础:第六节 math包的基础使用Math Functions_ps math function-程序员宅基地
- canal异常 Could not find first log file name in binary log index file_canal could not find first log file name in binary-程序员宅基地
- 【练习】生成10个1到20之间的不重复的随机数并降序输出-程序员宅基地
- linux系统扩展名大全,Linux系统文件扩展名学习-程序员宅基地
- WPF TabControl 滚动选项卡_wpf 使用tabcontrol如何给切换的页面增加滚动条-程序员宅基地
- Apache Jmeter常用插件下载及安装及软硬件性能指标_jmeter插件下载-程序员宅基地
- SpringBoot 2.X整合Mybatis_springboot2.1.5整合mybatis不需要配置mapper-locations-程序员宅基地
- ios刷android8.0,颤抖吧 iOS, Android 8.0正式发布!-程序员宅基地
- 【halcon】C# halcon 内存暴增_halcon 读二维码占内存-程序员宅基地