”ROS教程“ 的搜索结果
有关此软件包的更多信息,演示和教程,请访问ROS Wiki上的页面。 对于RTAB-Map库和独立应用程序,请访问或 。安装ROS2分布正在建设中:请参阅。ROS分布RTAB-Map在ROS发行版中以二进制形式发布。 理性的$ sudo apt ...

主要介绍了CLion中编译ROS工程的配置,本文给大家介绍的非常详细,对大家的学习或工作具有一定的参考借鉴价值,需要的朋友可以参考下
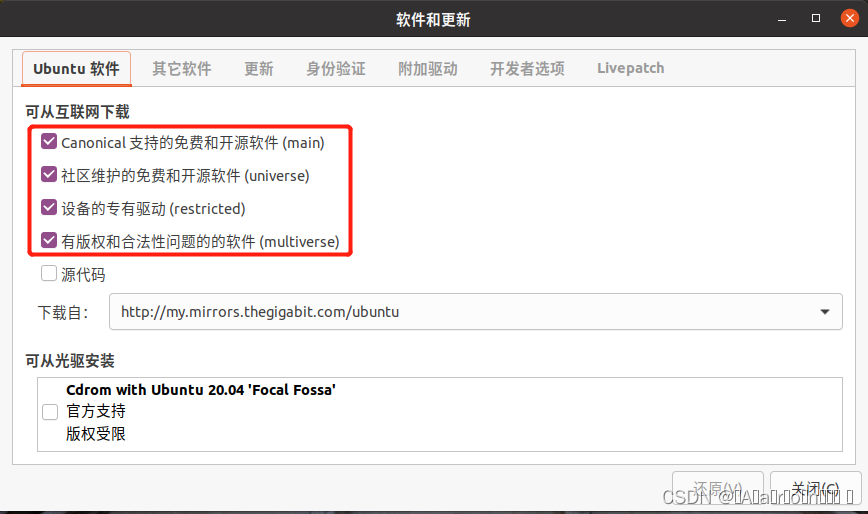
Ubuntu20.04安装ROS(noetic)详细教程与问题总结
使用ROS的发布器对象,在构造函数中创建一个 ros::Publisher 类型的对象,用于发布路径点信息到指定的ROS话题。 在 LoadWaypointsArray_() 函数中,根据指定的路径点文件路径,打开并读取路径点文件。然后解析每一行...
在和很多用户聊了之后,我们发现 ROS 是大家开发机器人的一个痛点。 尽管和几年前ROS刚在国内兴起时相比,现在ROS的使用人群...但对机器人开发感兴趣的初学者来说,仍然缺少免费、系统、详细、全面,手把手的ROS教程。

ROS学习教程304第四十三节
标签: 课程资源
ROS学习教程304第四十三节
然后发现可以一键安装,话不多说,直接终端输入如下指令。回车之后系统会自动安装ros。
Ros软路由与Winbox教程[汇编].pdf
通过安装ros kinetic,pcan驱动及barrett hand ros包控制两个barrett机器手运动。内有全部安装资源及教程。
ROS与Python入门教程.pdf
ros::ServiceServer类 2.2 常用命令行工具 rosservice 2.2.1 rosservice call 使用提供的参数调用服务可以在服务名后直接跟参数列表,也可以使用字典的格式(键入服务名后,按tab自动补全,默认是这种格式)。 ...
Ubuntu和ROS版本对应关系及官方支持结束时间,加粗的为还在支持的版本。 Ubuntu ROS End of Life 14.04 LTS indigo lgloo April, 2019 16.04 LTS Kinetic Kame April, 2021 18.04 LTS Melodic Morenia ...
Enable pretty-printing for gdb

使用机器人操作系统ROS 2和仿真软件Gazebo 9搭建机器人教程(一) 本篇,通过此案例学习并熟练掌握ROS2的如下内容: ROS2常用命令回顾 遥控机器人在环境中运动 rqt和rviz2 摄像头图像显示和激光数据可视化 ROS2...

最新的ROS路由器中文教程,实用最新的ROS路由器中文教程,实用
1.ROS仿真知识点rviz urdf gazebo的知识点网站: https://wiki.ros.org/urdf http://wiki.ros.org/rviz http://gazebosim.org/tutorials?tut=ros_overview 2.ROS学习官网中文整理: 网站链接 3.ROS问答社区:...
ros完美版本集合,ros大玩家视频教程,ros大玩家教案 ros完美版本集合,ros大玩家视频教程,ros大玩家教案
机器人操作系统ROS安装教程
标签: 机器人
机器人操作系统ROS详细安装说明
ROS软路由的基本操作 一、IP地址的设置 这里用setup进行配置,也可用其他方式进行。 输入a,输入IP地址,格式如:192.168.0.1/24;输入g,设置默认网关地址。 设置IP和网关完成后的界面。 二、路由设置 为了管理...
ROS多台电脑间进行通信 网线 无线教程都有,集合了各种遇到的坑和问题,都给了解决办法,调试不易,多多珍惜
ROS在Windows10下的安装和使用 windows下安装ros: 首先在visual studio官网(https://visualstudio.microsoft.com/zh-hans/free-developer-offers/) 下载visual studio最新版本 选择下载社区版Visual Studio ...
非常好用的路由软件文档,不可不学,不用花钱。
ROS学习教程,208第三十七节
标签: 课程资源
ROS学习教程,208第三十七节
介绍ROS安装的三种方法,使用第一种方法可以简单快速安装ROS
推荐文章
- Ubuntu/linux下下载工具_ubuntu下载软件助手 linux版本-程序员宅基地
- HTML、JSP前端页面国际化(i18n)_html全局国际化-程序员宅基地
- Python高级-08-正则表达式_写出能够匹配只有下划线和数字还有字母组成(且第一个字符必须为字母)的163邮箱(@1-程序员宅基地
- 寻仙手游维护公告服务器停服更新,寻仙手游2月1日停服更新公告 2月1日更新了什么...-程序员宅基地
- 用python自动预约图书馆座位_微信图书馆座位秒抢脚本-程序员宅基地
- Android真机或模拟器激活Xposed框架的方法_de.robv.android.xposed.installer-程序员宅基地
- 操作系统为什么要分用户态和内核态_用户态和内核态都需要cpu参与,为什么要区分-程序员宅基地
- 01—JVM与Java体系结构(简单介绍)_01_jvm与java体系结构.pptx-程序员宅基地
- 国有建筑企业数字化转型整体解决方案_建筑企业数字化转型行动方案-程序员宅基地
- 性能测试的软件------loadrunner_loadrunner有有三个图标,-程序员宅基地