笔者在实践过程中在Slam建图这一块卡了许久,网上教程基本都是复制代码,对初学者很不友好,有的也不正确,笔者肝出来后想提供一篇详细的博客,帮助后来人。 此博客注重原理,使用衫川雷达delta 3i,其他雷达一样的...
”ROS中urdf与xacro对比“ 的搜索结果
记录初学ros,从solidworks建模到使用gazebo、rviz仿真实现建图的过程,希望对其他初学者有帮助

这个问题不是那么好回答,urdf——Gazebo——ros_control——MoveIt,这是我在很久后才能给出的一个答案。那么之前我是怎么做仿真的呢? 1. 借助Arbotix舵机接口来仿真 之前是在学习《ros by example volume 2 》的...
机器人系统仿真:是通过计算机对实体机器人系统进行模拟的技术,在 ROS 中,仿真实现涉及的内容主要有三:对机器人建模(URDF)、创建仿真环境(Gazebo)以及感知环境(Rviz)等系统性实现。 2 机器人系统仿真相关组件 ...


这一篇内容是将小车与机械臂组合在一起,涉及到很多文件的修改,我还在修改过程,边做我边记录,也不知道最后结果能否正确,最终文件我会上传github。 创建小车机械臂模型 小车机械臂模型在arm_car_description文件...
【代码】Linux && ROS常用命令。
首先介绍本篇博客的背景:要进行双臂机器人的规划和协作控制方法的仿真,但是双臂机器人的机械结构...所以,为了较方便的实现调整机器人机械结构的需求,从结构图到导入至V-rep仿真软件中可以有两种方法: 从Solidwor
之前我们创建xacro文件的时候,每个物体只有一个简单的可视化属性,如果要在Gazebo中实现的话,需要对这些可视化模型的每个link添加碰撞属性以及惯性参数。以base_link为例: <link name="base_link"> <...
量了关节的位置,想象着对比着一个测试模型,手动写好了模型文件 实际上是很多xml的xacro。 写个launch 方便反复调试造型和关节限位。 有了好的模型之后调用 roslaunch moveit_setup_...

学习古月课程遇到的问题以及实践过程
标签: 学习
第五章 导航功能包集入门 使用ROS创建地图出错:(特别注意第一条命令中的不是单引号,而是反引号) $ roslaunch chapter5_tutorials gazebo_mapping_robot.launch model:="`rospack find robot1_description`/urdf/...
机器人设计与制作系列 ROS机器人程序设计 (原书第2版) Learning ROS for Robotics Programming,Second Edition 恩里克·费尔南德斯(Enrique Fernández) 路易斯·桑切斯·克雷斯波(Luis Sánchez Crespo) ...



44.在PIBOT中适配雷达
标签: 经验分享
1. 雷达配置与运行 配置 当前的雷达在pibot_lidar包中定义, pibot_lidar/launch可以看到不同雷达的支持, 配置选择雷达只需要执行pibot_init_env.sh脚本在提示配置雷达时选择对应的雷达 please specify your pibot ...
给自己的机械臂添加夹爪
标签: 人工智能




一、IKFAST简介 IKFAST是一种基于解析算法的运动学插件,可以保证每次求解的一致性。 mkdir -p ~/ikfast_ws/src cd ~/abb_ws/src catkin_init_workspace cd ~/abb_ws catkin_make
在ROS中有3个可以模拟机器人的模拟器软件:Gazebo Stage ArbotiX(就是RVIz) 你可以任选一个: Gazebo是一个仿真环境(平台),可以进行三维机器人动力学仿真等,够模拟复杂和现实的环境中关节型机器人,很强大。可以...

ROS 操作系统 是起源于2007年斯坦福大学人工智能实验室的项目与机器人技术公司Willow Garage的个人机器人项目(Personal Robots Program)之间的合作,2008年之后就由Willow Garage来进行推动。 ROS 是开源的,是用于...
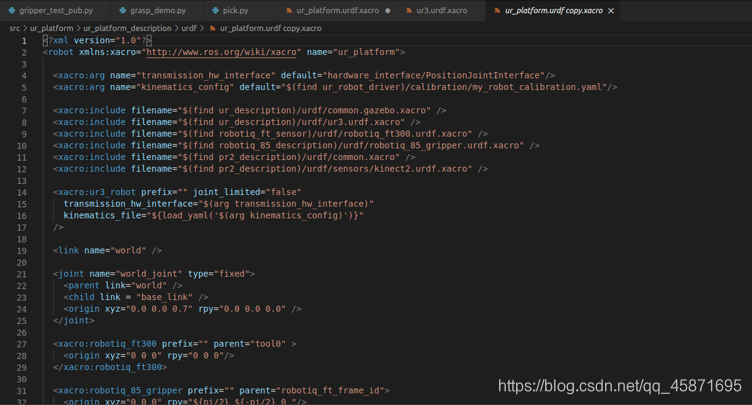
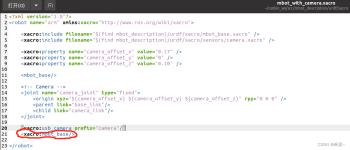
前言 使用Moveit setup assistant可以生成moveit的配置文件。如果这些文件有被手动修改过,那么再次使用配置助手时就会被覆盖还原。...在默认UR包中,urN_robot.urdf.xacro中使用了一个名为world的link,以...
推荐文章
- python入门(13)异常与文件_except filenotfounderror:-程序员宅基地
- Android面试攻略_详细了解在当今的社会里android工程师应具备什么的技能?并能详细说说自己的见解。-程序员宅基地
- Zendframework 1.6整合Smarty_setting private or protected class member is not a-程序员宅基地
- Qt-装饰者模式_qt装饰模式-程序员宅基地
- 新开普掌上校园服务管理平台service.action RCE漏洞复现 [附POC]-程序员宅基地
- 基于 Milvus 的音频检索系统-程序员宅基地
- 331、基于51单片机智能红外遥控暖风机温度无线蓝牙远程控制系统设计(程序+原理图+配套资料等)_红外感应暖风机自动控制系统设计-程序员宅基地
- Android自定义圆角矩形图片ImageView_android 矩形圆角imageview-程序员宅基地
- 又见回文 字符串-程序员宅基地
- switch的参数可以是什么类型?_switch的参数有哪些-程序员宅基地