”ROS“ 的搜索结果
本文是关于ROS的计算图图rqt,实体关系工具、各类节点信息检索等一系列操作的简述。
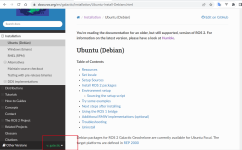
ROS 是一个适用于机器人的开源的元操作系统。此教程以Ubuntu 18.04为例,安装配置ROS Melodic。
本篇文章主要介绍了ROS的安装和卸载方法,其中包括手动安装教程、手动卸载过程以及ROS自动安装和卸载脚本的使用方法。通过阅读本文,读者可以快速学习ROS的安装和卸载方法,并能够在实际项目中灵活运用。ROS作为一个...

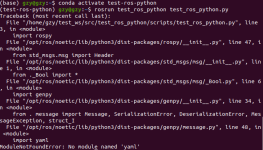

Python-PyQt-ROS通信前言一、安装并引入库二、使用方法创建一个对象连接ROS检测连接状态断开连接订阅话题发布话题使用服务活动客户端三、简单的ROS通信建立总结 前言 建立与开源机器人系统ROS的通信,并基于QT创建...
ros中关于ros::Rate 和ros::spin()等的理解
今天给大家带来一篇文章,详细描述了ROS2相对ROS1做出了哪些改变?看完之后,小鱼自感收获颇深,希望大家也能有所收获。 一、平台依赖 1.1 平台 ROS1只在ubuntu进行 CI 测试。但ROS社区的中也做了对其他linux发行版...
文章信息:标题:ROS1/ROS2版本代号原文地址:https://fishros.org.cn/forum/api/topic/96关键词:一键安装,版本代号,参与者:,版权声明: 文章中所有知识产权归鱼香ROS及原作者所有。

通过本节课的学习,希望大家对节点的概念有所了解,下一节小鱼带你一起学习工作空间的相关概念ROS2命令行工具源码;
在面对ROS环境配置时,我们会发现,有的时候非常难查的问题有时候是因为ROS的CMakeList和package配置文件写的不对导致的。ROS1的时候就很无能为力,需要熟练地了解每个模块与配置。而ROS2中就提供了一个可以检测ros2...

ROS 最初是作为 Willow Garage PR2 机器人的开发环境而诞生的。我们的主要目标是为用户提供使用 PR2 进行新颖研究和开发项目所需的软件工具。同时,我们知道 PR2 不会是世界上唯一甚至最重要的机器人,我们希望 ROS ...
文章目录一、ROSCPP常见的时间函数Time API1、Time and Duration1.1 获取当前时间1.2 创建时间与时长的实例1.3 转换时间、时长实例的格式1.4Time与Duration运算2、Sleeping与Rate2.1、bool ros::Duration::sleep()...

在ROS中,发布者(publisher)和订阅者(subscriber)用来做什么?下面哪个命令可以查看ROS节点的详细信息(包括发布和订阅的话题、服务等)?好的,下面是ROS基础知识考核试题,共10道选择题。下面哪个命令可以查看...

robag的使用方法,仅记录高频命令,30秒学会!


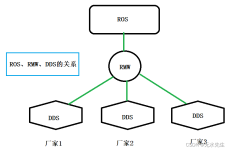
ROS 和 ROS2 由于历史原因,ROS 有两个大版本 —— ROS1(通常用 ROS 替代)和 ROS2,两者的差别如下图所示。 我们知道 ROS 始于2007年11月,最早是“柳树车库”用于 PR2 机器人的开发,同时希望 ROS 能用于其他...
推荐文章
- 记录CentOS7 Linux下安装MySQL8_适合正式环境_干货满满(超详细,默认开启了开机自启动,设置表名忽略大小写,提供详细配置,创建非root专属远程连接用户)_centos7安装mysql8-程序员宅基地
- python 读取grib \grib2-程序员宅基地
- Kimi Chat,不仅仅是聊天!深度剖析Kimi Chat 5大使用场景!-程序员宅基地
- Datawhale-集成学习-学习笔记Day4-Adaboost-程序员宅基地
- TexStudio配置以及解决无法Build&View_texstudio 无法启动 build & view:pdflatex:"d:/data/texl-程序员宅基地
- 用户空间访问I2C设备驱动-程序员宅基地
- 人脸识别算法初次了解-程序员宅基地
- maven的pom文件学习-程序员宅基地
- wamp mysql 没有启动,WAMP中mysql服务突然无法启动 解决方法-程序员宅基地
- 《树莓派Python编程入门与实战(第2版)》——3.7 创建Python脚本-程序员宅基地