环境:ubuntu20.04 ,ros-foxy(ros2),vscode 背景:项目需要,一直折腾把ros1下面的包升级到ros2版本,没有熟人带路,纯属个人查找资料摸索,自我理解所得,有错误的地方,望大佬们不吝赐教. 1.消失的句柄 ros1: ...
”ROS“ 的搜索结果


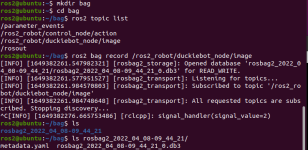
代码实现ROSbag录制多个话题的数据和回放数据用c++封装成函数

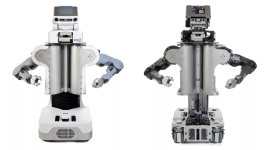
作为机器人领域最为流行的开源框架之一,ROS(Robot Operating System)提供了丰富的工具来支持机器人的开发和部署。除此之外,还有许多其他的ROS工具可以用于机器人开发和部署,了解这些ROS工具的使用方法和原理,...
ros2配置与使用
文章目录一、rosparam 命令行操作二、launch 文件载入param三、c++ 中操作 param四、python 中操作 param五、操作 param 时注意命名空间 参数服务器 Parammeter Server 参数服务器维护的是一个字典,里面存储的是key...


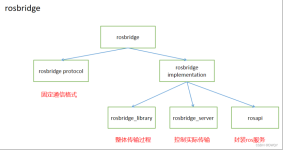
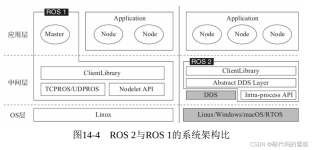
ROS2系统的核心部分是ROS网络(ROS Graph)。 ROS网络是指在ROS系统中不同的节点间相互通信的连接关系。 ROS Graph这里翻译成了ROS网络,因为我觉得Graph更加抽象,而网络的概念更容易帮助理解其内涵。 2. ROS网络(ROS...
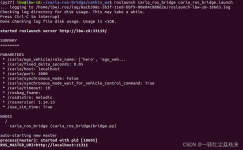
PIL是Python Imaging Library的缩写,它是Python的一个图像处理库,rosbridge_server需要用到它来进行图像压缩。这将启动rosbridge服务器并在WebSocket端口(默认为9090)上监听传入的连接请求。要启动ROS2中的ros...
ROS2学习(1)ROS2简述
标签: ROS2
ROS单线程与多线程处理
标签: ROS
ROS单线程与多线程 ros::spin, ros::spinOnce, ros::MultiThreadedSpinner, ros::AsyncSpinner, ros::setCallbackQueue
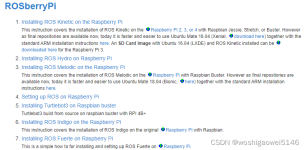
如何傻瓜式快速一键安装ROS或ROS2,看这篇文章就够了!! 一键帮你解决配置源、安装ROS、配置rosdep,让你安装ROS/ROS2不再出错! (Ubuntu版本16.04~22.04、ROS1/ROS2版本步骤一样!)
ROS中自定义带有header的消息文件 为什么需要header? 在发布端发布的数据或者在订阅端订阅数据时,数据通常是连续发布或者被订阅的,这些信息没有特定的标识,搞得我们发和收了很多消息,都不知道具体发布了多少...

推荐文章
- 如何使用粒子群优化算法,在Python中有效地训练神经网络并提高预测精度_python粒子群(pso)如何优化神经网络参数-程序员宅基地
- mcgs屏保功能实现_昆仑通态屏幕保护画面-程序员宅基地
- @程序员,你需要点财商-程序员宅基地
- amesim与simceter 3D联合仿真配置_amesim与starccm联合仿真设置-程序员宅基地
- JDBC数据库访问——数据库操作-程序员宅基地
- 开关电源PCB设计中的走线技巧-程序员宅基地
- 信息安全初窥(二):信息安全能力体系_信息安全需要具备哪些能力-程序员宅基地
- 英飞凌 Tc3xx AURIX 2G多核处理器简介_英飞凌多核调度机制-程序员宅基地
- SSM项目tomcat启动失败-Multiple Contexts have a path of “/ssm-crud“_ssm用tomcat启动报错-程序员宅基地
- 【C语言】C语言简介_c语言 简历-程序员宅基地