”ROS“ 的搜索结果

本着为大家谋福利的心态,根据自己以往的开发经验,打算写一个从零开始制作一个可以实现地图构建和导航的ROS小车。目前某宝上面有很多现成产品,但是我个人认为,一个好的移动机器人开发工程师,应该对机器人的整个...
大家好,我是开心的小鱼,经过几个月的努力,动手学ROS2课程终于和小伙伴们见面了,有很多小伙伴一下午的时间就把前两章给搞定了,小鱼要抓紧啦~ 之前说的鱼香ROS网站已经上线啦,内容参考了docschina,版面简单明了...
ros2常用命令,ros2 pkg,ros2 node, ros2 topic, ros2 param, ros2 bag, ros2 service, ros2 action
机器人操作系统ROS(十一):ROS时间戳及其与年月日时分秒毫秒格式的转换
ros1的rosbag和ros2的rosbag互换

本篇是对ROS基础学习的一个总结。初学者可通过本篇博文对ROS有一个总体上的了解,也可获取一些学习资料,但是无法代替详尽的学习教程;有一定ROS基础者,可以通过本篇博文对ROS的基础知识进行一个回顾,需要用到相关...
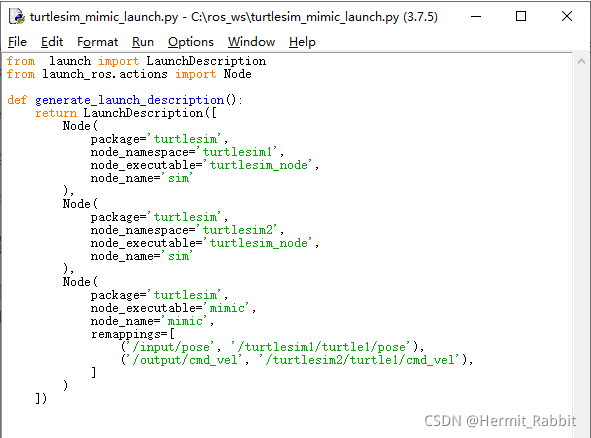
在处理launch过程中,ROS1和ROS2还是有些差别的,因为文件结构不同,不能直接搬用。这里将两者建立过程做一个比对,以提升概念的清晰度。在ROS2中,单独的launch文件是一个python文件,因此脱离ros2环境也能启动,...

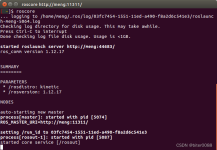
目录概述安装ROS21)安装python3及colcon2) 添加ROS2的源3)安装eloquent桌面版本4)修改~/.bashrc2 安装cartographer及cartographer_ros1) 安装cartographer2) 安装cartographer_ros3. 测试cartographer1) 创建...

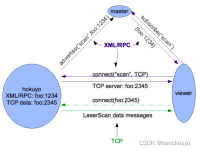
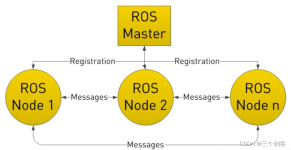
ROS1采用分布式框架,其架构可以分为三个层次:基于Linux系统的OS层,实现ROS核心通信机制以及众多机器人开发库的中间层;在ROS Master的管理下保证功能节点的正常运行的应用层。ROS1的通信机制是每个节点通过ROS ...

ubuntu 22.04 apt-get 安装 ros1 ros Noetic 最新版
机器人操作系统ROS是使用最广泛的机器人中间件平台。它在机器人社区中使用了10多年,无论是在业余爱好者领域还是在工业领域。ROS可用于各种微控制器和计算机,从Arduino到Raspberry Pi再到Linux工作站,它为电机控制...


推荐文章
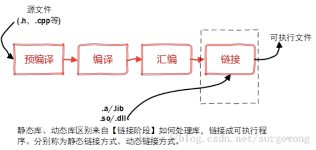
- C++零碎知识点(一)-程序员宅基地
- 【Python学习笔记】Coursera课程《Python Data Structures》 密歇根大学 Charles Severance——Week5 Dictionary课堂笔记...-程序员宅基地
- v-html 解析字符串到 html 换行显示_html字符串 v-html-程序员宅基地
- 招收跨专业考计算机的学校,跨专业考研,接受跨专业考研的学校。-程序员宅基地
- 数学模型预测模型_改进著名的nfl预测模型-程序员宅基地
- ELK-FileBeat入门_filebeat 6.5.4 - windows-程序员宅基地
- 微信小程序架构图与开发_微信小程序框架图-程序员宅基地
- Node.js 下载与安装教程_node下载-程序员宅基地
- MySQL报错:The server time zone value '�й���ʱ��' is unrecognized or represents more than one time zone_连接失败! the server time zone value ' й ' is-程序员宅基地
- 数学与生活——读书笔记-程序员宅基地