
”ORB-SLAM3“ 的搜索结果

ORB-SLAM3原文

那篇文章中提到了ORB-SLAM3是一个支持视觉、视觉加惯导、混合地图的SLAM系统,可以在单目,双目和RGB-D相机上利用针孔或者鱼眼模型运行。与ORB-SLAM2相比,ORB-SLAM3在处理大视差和长时间未观测到的场景时效果更好。...
ORB-SLAM3理解
标签: slam
ORB-SLAM3理解 长期更新
总结 目录 一、安装 ...四、与ORB_SLAM2性能对比 ...第三方库:Pangolin opencv3.2 Eigen3 ...https://github.com/UZ-SLAMLab/ORB_SLAM3 ...ORB-SLAM3论文地址:...cd ORB-SLAM3/ chmod +x build.sh sudo ./bu...
实现步骤:...
VI_ORB_SLAM2:基于ORB-SLAM2的单目/立体视觉惯性ORB-SLAM 该存储库包括Visual-Inertial ORB-SLAM的Monocular版本和Stereo版本。 这两个是的和的。 有关详细信息,您可以参考Examples/Monocular/mono_euroc_VI.cc和...
ORB-SLAM3 V0.4:Beta版,2021年4月21日 作者:卡洛斯·坎波斯(Carlos Campos),理查德·埃维拉(Richard Elvira),胡安·J·戈麦斯·罗德里格斯(Juan J.GómezRodríguez),( ,( 。 描述了每个版本的功能...
点击上方“3D视觉工坊”,选择“星标”干货第一时间送达作者丨小深来源丨深话AI本文总结了特征点法SLAM中目前效果最好的方法:ORB-SLAM2 / ORB-SLAM3 相关改进代码汇总,...
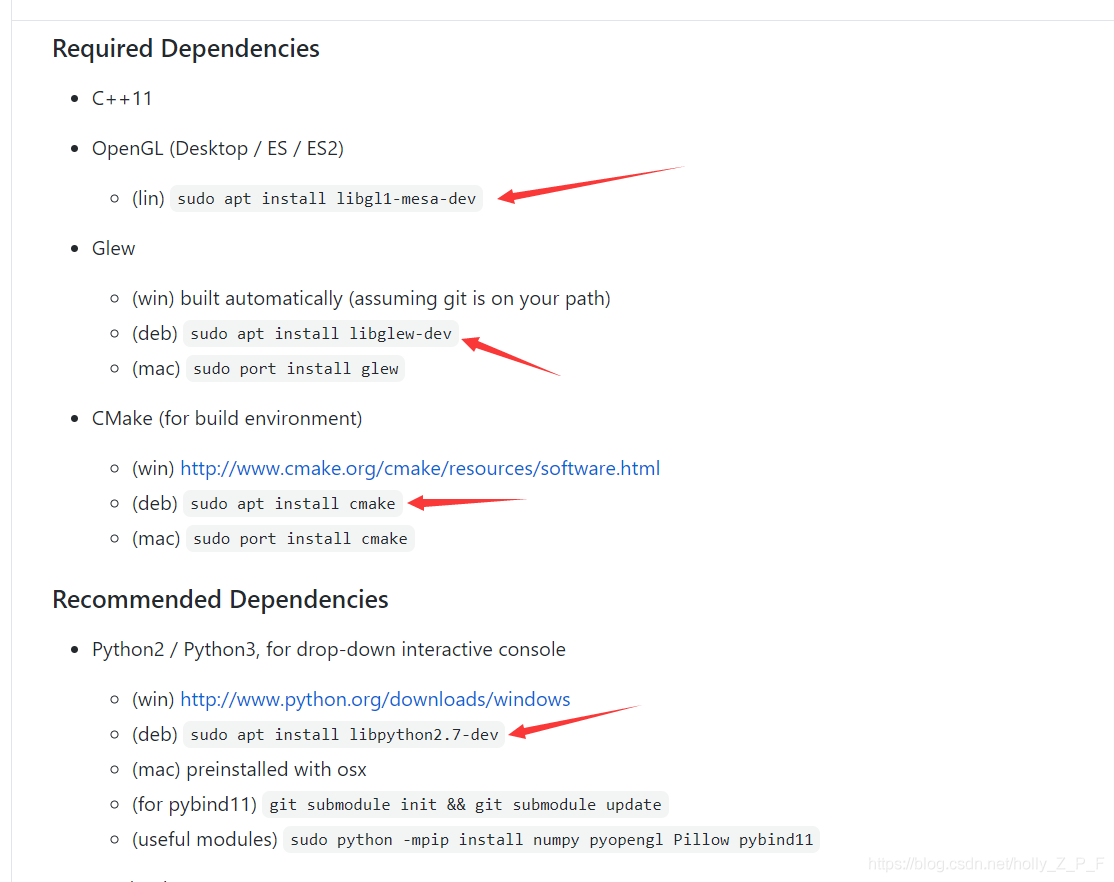
本文主要包括Ubuntu18.04系统下,并已安装对应的ROS-melodic机器人系统,在此基础上如何一步步安装ORB-SLAM3的依赖库,比如OpenCV,Eigen3,Pangolin,最后安装非ROS版本和ROS版的ORB-SLAM3,以及安装过程中遇到的...
ORB-SLAM2(中文注释版) 评论员: 作者: , , 和 ( ) 2017年1月13日:现在支持OpenCV 3和Eigen 3.3。 2016年12月22日:添加了AR演示(请参见第7节)。 ORB-SLAM2是用于单目,立体声和RGB-D相机的实时SLAM库...

ORB-SLAM3 GitHub 链接: Link在 ORB-SLAM3 的 CMakeLists.txt 中会有检查,如果不满足会有报错。这里我选择安装的是 Pangolin v0.6,下载链接: Link 如果有报错:,则 安装 Pangolin v0.6 1.3 OpenCV 这里我选择...
针对目前视觉SLAM(同时定位与地图构建)系统只能输出相机的运动轨迹图而不能生成用于路径规划和导航地图的缺点,提出了一种基于ORB-SLAM2的网格地图实时构建算法。首先,建立了一个适用于视觉SLAM的逆传感器模型...
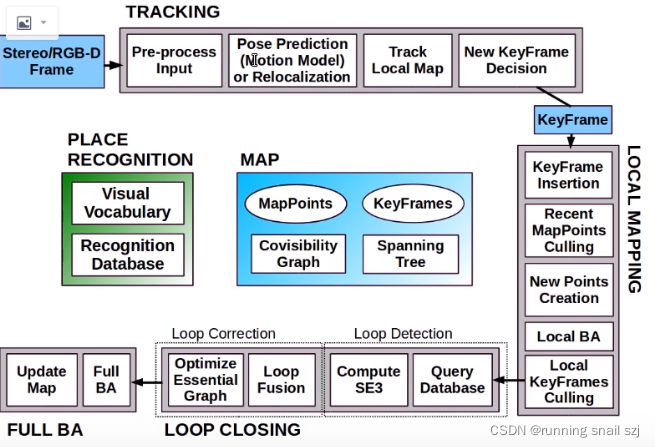
最近在学习ORB-SLAM3的Tracking线程,主要从一下几个方面进行讲解:ORB-SLAM3初始化、传感器输入模块、Tracking线程子模块、Tracking线程代码详解。其中包括ORB-SLAM3整个系统初始化的代码是如何实现的,单目、双目...
目前手上有一个特定的任务,做应急救援的视觉SLAM,目前公共数据集比较少,考虑自建数据集,从网络上爬虫火灾、地震的等手机录制的视频,应用一些现有成熟ORB-SLAM3系统到这个数据集上看效果,然后根据效果得到一些...

安装环境:虚拟机VMware运行的Ubuntu版本是18.04。

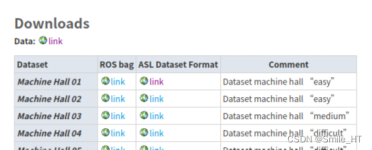
ORB-SLAM3算法1 已成功编译安装ORB-SLAM3到本地,本篇目的是用EuRoc开源数据来运行ORB-SLAM3,并生成轨迹,最后用evo评估工具来评估ORB-SLAM3生成的轨迹和真值轨迹。
小白配置ORB-SLAM3
现在实验室视觉SLAM已经不够满足,所以需要多模态融合,正巧购入高翔博士推荐的INDEMIND双目惯性模组,根据官方例程在中使用ROS接入ORB-SLAM3,这回有SDK及ORB-SLAM3安装过程中的各种常见性问题解决方法及安装细节,...

本文主要记录在Ubuntu18.04系统下配置和运行ORB-SLAM3的配置方法过程和出现的问题
ORB-SLAM3算法1 已成功编译安装ORB-SLAM3到本地,本篇目的是用TUM-VI开源数据来运行ORB-SLAM3,并生成轨迹,最后用自带的evaluate_ate_scale验证轨迹。
推荐文章
- 联邦学习综述-程序员宅基地
- virtuoso--工艺库答疑_tsmc mac-程序员宅基地
- C++中的exit函数_c++ exit-程序员宅基地
- Java入门基础知识点总结(详细篇)_java基础知识重点总结-程序员宅基地
- 【SpringBoot】82、SpringBoot集成Quartz实现动态管理定时任务_springboot集成quratz 实现动态任务调度-程序员宅基地
- testNG常见测试方法_idea_java_testng 测试-程序员宅基地
- Debian11系统安装-程序员宅基地
- Centos7重置root用户密码_centos7更改root密码-程序员宅基地
- STM32常用协议之IIC协议详解_正点原子stm32 iic-程序员宅基地
- 【视频播放】Jplayer视频播放器的使用_jplayer 播放amr-程序员宅基地