”Mrobot“ 的搜索结果
roslaunch mrobot_gazebo view_mrobot_with_camera_gazebo.launch 然后打开了一系列节点,信息(topic)开始流动。 这时候在命令行输入 rosrun rviz rviz 可以打开rviz,在此界面ADD 一个RobotModel 并更改fixed ...
catkin_create_pkg mrobot_description urdf xacro (2)mrobot_description下创建urdf, launch文件夹,在urdf文件夹内放置机器人模型的 URDF或xacro文件。launch文件夹内放置相关启动文件。 URDF例子mrobot_chassis....
使用古月居的“robot_marm”包直接编译出错 在ubuntu18,自己建的工作空间里面,将“ros_exploring-master”整个功能包拉进去工作空间编译发生报错,因为只需要用到“robot_marm”这个包(跟着书上做机械臂仿真),...
前言:无。 前提:已下载并编译了相关功能包集,如还未下载,可通过git... 一、启动仿真环境 cd ~/catkin_ws/src/robot_mrobot/mrobot_gazebo/launch roslaunch mrobot_laser_nav_gazebo.launch 二、启动...
本制作采用了:上位机----tx2(ubuntu16.04) 下位机----Arduino 2560 传感器-----思岚rplidar A2 ...现在主要对自己的上位机代码进行一些解释: 一、建图 建立地图的方式有两种:gmapping算法与 hector算法 ...
gaze仿真器搭建虚拟环境环境设置二级目录总结+参考 环境设置 打开gazebo,进行环境设置 终端输入命令: gazebo #启动gaze 也可以: roscore #启动ros系统 rosrun gazebo_ros gazebo #再启用gazebo平台 ...

用ROS来完成一个安装有激光雷达的机器人模型
环境:ubuntu18 xacro编辑 源文件概览: ubuntu@ubuntu-vpv:~/mybot_ws$ tree src/ src/ ├── CMakeLists.txt -> /opt/ros/melodic/share/catkin/cmake/toplevel.cmake └── mybot_description ...
文章目录Gazebo物理仿真环境搭建仿真步骤配置机器人模型机器人底盘仿真 Gazebo物理仿真环境搭建 仿真步骤 配置机器人模型 创建仿真环境 开始仿真 配置机器人模型 机器人底盘仿真
文章目录一、安装Rviz工具二、搭建gazebo机器人物理仿真环境三、gazebo搭建传感器仿真环境,并通过Rviz数据显示四、参考???? 一、安装Rviz工具 1. 准备工作 如何在虚拟机下打开摄像头,请参考:OpenCV在Ubuntu下的...
一、URDF简介 URDF(Unified Robot Description Format,统一机器人描述格式)是ROS中一个非常重要的机器人模型描述格式,ROS同时也提供URDF文件的C+解析器,可以解析URDF文件中使用XML格式描述的机器人模型。...
ROS笔记(15) Xacro
标签: Xacro

[ROS]知识点拾遗
标签: ros
1.创建工作空间mkdir -p ~/temp_ws/src cd ~/temp_ws/src catkin_init_workspace2.创建新的packagecd ~/temp_ws/src catkin_create_pkg beginner_tutorials std_msg rospy roscpp cd .. catkin_make3系统命令 ...

Request request = new Request.Builder() .url("http://mrobot.pcauto.com.cn/v2/cms/channels/3?pageNo=1&pageSize=20&v=4.0.0") .build(); Response response = client.newCall(request).execute(); String ...
ROS学习-----基于ubuntu16.04上Gazebo机器人环境搭建的传感器仿真目录一、Gazebo环境搭建前的准备1、将搭建模型下载到我们的gazebo环境下2、升级我们的gazebo版本二、创建配置launch文件参数的world文件1、进入工程...
ROS中阶笔记(四):机器人仿真—Gazebo物理仿真环境搭建(重点) 文章目录1 ros_control1.1 ros_control安装2 Gazebo仿真步骤(重点)2.1 配置物理仿真模型2.1.1 第一步:为link添加惯性参数和碰撞属性2.1.2 第二步...
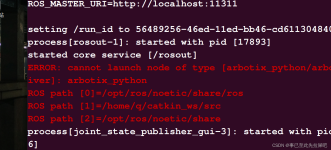
运行roslaunch mrobot_bringup mrobot_with_laser.launch报错七月的风__:[博客] [成就]59初53智能语音点名系统的设计与实现(论文+源码)_kaic金牌工作室:[博客] [成就]87高(关键词:论文)54OOPreFinalWorkForb04:...
origin指几何中心,xyz即中心坐标(距离原点距离,单位米),rpy分别对应roll横滚角(绕x),pitch俯仰角(绕y),yaw航向角(绕z)geometry指几何形状,常见box立方体,sphere球体,cylinder圆柱体等,不同的形状有...
下载完成后,你需要修改display_mrobot_chassis_urdf.launch文件。具体操作如下: ``` <!-- 运行robot_state_publisher节点,发布tf --> ``` 完成以上操作后,你可以在rviz中打开joint_state_publisher图形控制界面...
安装ros noetic安装kobuki双目相机建图 安装ros noetic sudo sh -c '. /etc/lsb-release &&... /etc/apt/sources.list.d/ros-latest.list' sudo apt install curl # if you haven't alrea.
在 launch 文件中使用 `$`+参数名 的语法可以引用该参数的值,例如 `value="$(find mrobot_gazebo)/worlds/cloister.world"` 中的 `$(find mrobot_gazebo)` 就是引用了名为 `mrobot_gazebo` 的参数的值。使用参数...
推荐文章
- 马斯克用数字孪生开启航天工业大时代,工互2.0来了吗?-程序员宅基地
- 0737-1.6.1-CDSW分布式计算_workbench分布式计算-程序员宅基地
- 动态规划算法(2)最长回文子串详解_最长回文子串动态规划-程序员宅基地
- 2010年5月12日Go生态洞察:Google I/O即将举办的Go事件-程序员宅基地
- javaWeb网上拍卖系统--秒杀与竞拍-程序员宅基地
- 我的WCF之旅(10):如何在WCF进行Exception Handling-程序员宅基地
- iOS 直播技术及Demo_ios直播懂的-程序员宅基地
- 浅谈深度学习_深度学习csdn-程序员宅基地
- _ZN10tensorflow8internal21CheckOpMessageBuilder9NewStringEv_undefined symbol: _zn10tensorflow8internal21checko-程序员宅基地
- 【深度学习】基于PyTorch搭建ResNet18、ResNet34、ResNet50、ResNet101、ResNet152网络_resnet34 resnet101-程序员宅基地