”Mrobot“ 的搜索结果
ros机器人开发实践代码,里面有robot_learning,robot_marm,robot_mrobot,robot_perception,ros2,ros_advanced,ros_primary代码,配合ros机器人开发实践这本书和视频来学习效果更好。
问题Diary 2021-2-7 1 ROS:No module named rospkg python2 与python3切换 2 :ImportError: dynamic module does not define module export function (PyInit__tf2) 问题是:python2 与python3切换 ...

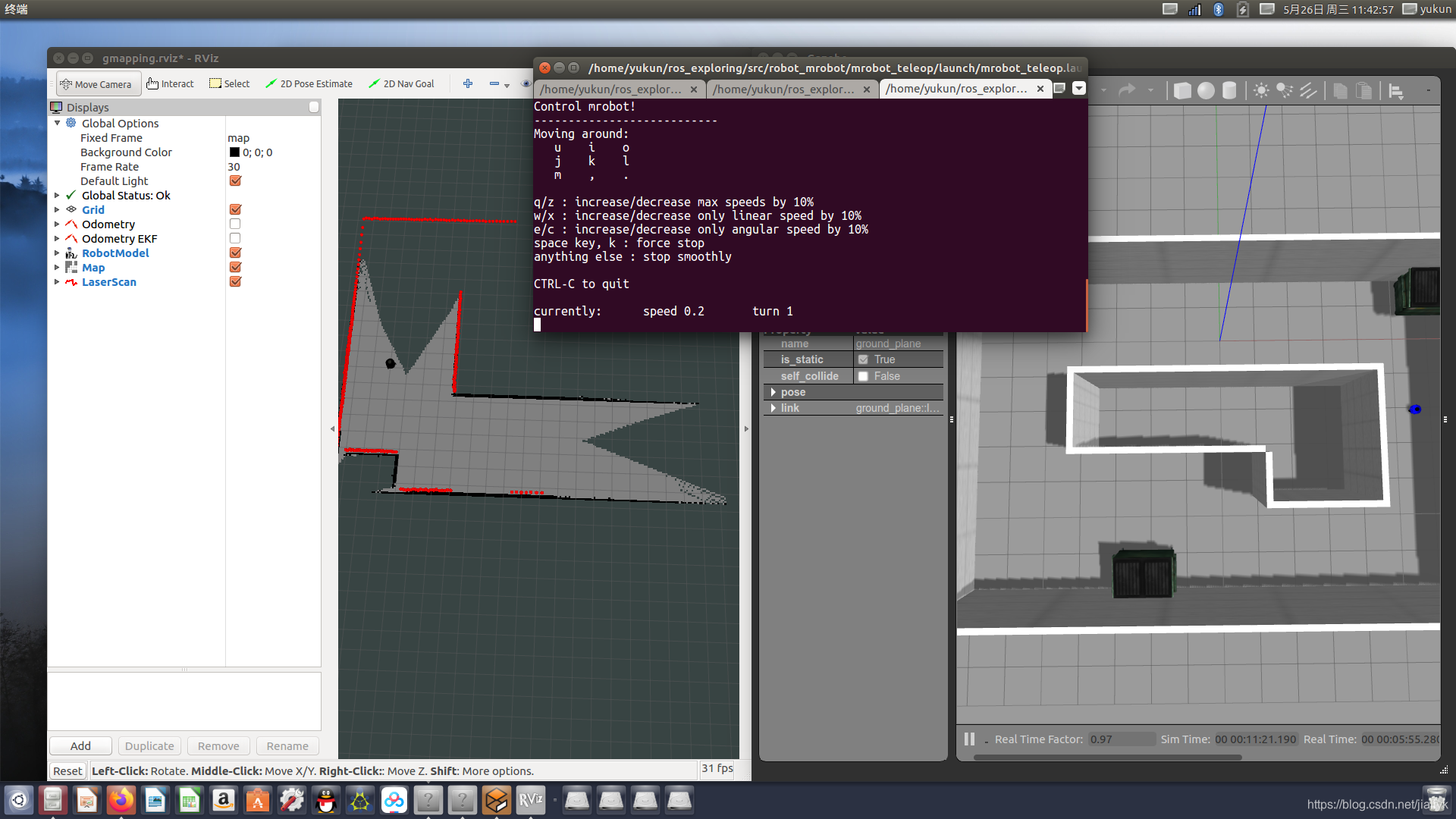
一、解读launch文件:mrobot_laser_nav_gazebo.launch 二、解读launch文件:gmapping_demo.launch 打开launch文件gmapping.launch: 三、解读launch文件:mrobot_teleop.launch 打开Python文件mrobot_teleop.py...
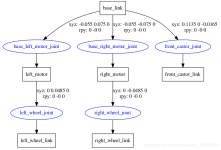
实现中参考啦这篇博客:...第一步,新建一个功能包:catkin_create_pkg mrobot_description urdf xacro第二步,在功能包mrobot_description 里面新建4个文件夹,命名为urdf,meshes,launch,config...
基于ArbotiX和rviz的仿真
标签: ROS
安装ArbotiX $ git clone https://github.com/vanadiumlabs/arbotix_ros.git 下载完成后,在工作空间的路径下使用catkin_make命令编译 并进行source ...mrobot_description/launch/arbotix_mrobot_wi...
1 安装arbotix控制器 下载安装arbotix控制器,在工作空间中输入以下命令 ... ...ERROR: cannot launch node of type [mrobot_teleop/mrobot_teleop.py]: can't locate node [mrobot_teleop.py] in

setting /run_id to a026ed1a-79ea-11ee-a7c8-58fb84d6cad6 ...process[mrobot_bringup-2]: started with pid [3905] process[joint_state_publisher-3]: started with pid [3906] [ INFO] [16989759
针对激光雷达, ROS在sensor_msgs包中定义了专用数据结构—— LaserScan, 用于存储激光消息。 ROS的很多功能包所需要的输入是激光二维数据 三维点云降为二维数据:把大量的数据拦腰截断,只抽取其中一行的数据,...

ERROR: cannot launch node of type [robot_state_publisher/state_publisher]: Cannot locate node of type [state_publisher] in package [robot_state_publisher]. Make sure file exists in package path and ...
在ros创建并优化URDF模型
在GAZEBO中仿真机器人导航
标签: ROS
之前使用的是shenlan的源码实现了一系列的功能,那么根据之前所学习是否可以使用一个自己的机器人实现gazebo仿真。这里我们尝试一下: 1、按照之前的方式我们给自己的机器人添加碰撞属性以及惯性属性,机器人的xacro...
环境:ubuntu14 ...:mrobot_ws/src/mrobot_description/urdf$ gedit mrobot_chassis.urdf <?xml version="1.0" ?> <robot name="mrobot_chassis"> <!-- BASE --> <link nam

arg name="model" default="$(find xacro)/xacro --inorder '$(find mrobot_description)/urdf/mrobot_with_kinect.urdf.xacro'" /> <arg name="gui" default="true" /> <param name="robot_...
探索未来智能:Dajianli的MRobot项目 项目地址:https://gitcode.com/dajianli/mrobot 项目简介 在开源的世界里,Dajianli 的 MRobot 是一款引人注目的项目。它是一个基于Python的、可编程的机器人平台,旨在帮助...
fixed frame unknown frame map

Ubuntu 20.04 ROS-Noetic ...原因:Noetic版本的ROS在xacro宏定义语法中与之前版本不同调用宏的时候需要在开头添加xacro:,修改mrobot.urdf.xacro文件中调用mrobot_body.urdf.xacro的语句: 将 <!--
一、创建工作空间 # 创建工作空间 $ mkdir -p catkin_ws/src $ cd catkin_ws/src $ catkin_init_workspace # 编译工作空间 $ cd catkin_ws $ catkin_make #构建install文件夹 $ catkin_make install ...

推荐文章
- SMT的基本知识介绍_smt行业基础知识-程序员宅基地
- 43.基于SSM的口腔护理网站|基于SSM框架+ Mysql+Java设计与实现(可运行源码+数据库+lw)-程序员宅基地
- HTML中Table表格的使用与漂亮的表格模板_html table 样式-程序员宅基地
- Linkage Mapper中的局部和全局地图比较实践指南(含实例分析)-程序员宅基地
- 线性筛求欧拉函数-程序员宅基地
- 初中几何题_初中几何题解-程序员宅基地
- jQuery 放大镜效果_jquery放大效果-程序员宅基地
- Python构建快速高效的中文文字识别OCR_中文ocr python-程序员宅基地
- SQL语句用case when实现if-else条件逻辑_case when里面可以加if else吗-程序员宅基地
- 数据结构实验课程设计报告求工程的最短完成时间_(1)用字符文件提供数据建立aoe网络邻接表存储结构; (2)编写程序,实现图中顶点的-程序员宅基地