其中,$(find mrobot_gazebo)表示在ROS包搜索路径中查找名为mrobot_gazebo的包,并返回该包的路径。cloister.world是该包中的一个Gazebo世界文件,用于描述仿真环境的物理场景。因此,该行代码的实际意义是设置仿真...
”Mrobot“ 的搜索结果
这段代码定义了一个名为mrobot的命名空间,里面包含了一些常量和变量的定义。其中,ender和header分别定义了两个字节的结尾符和头部标识符,用于串口通信时的数据传输。SPEED_INFO和GET_SPEED分别表示两种不同的数据...
使用retrofit完成http://mrobot.pcauto.com.cn/v2/cms/channels/3?pageNo=1,只需要几个步骤:1. 在build.gradle文件中添加retrofit库的依赖;2. 创建Retrofit实例;3. 创建接口;4. 创建请求方法;5. 使用Call类...
Turtlebot机器人资料,超值资料,Mrobot使用手册,Create Open Interface_v2开源协议,Motor_driver电机驱动原理图,M-Robot_V1.2主控原理图,M-Robot软件接口说明,Linux-arduino-hex,mrobot-indigo 相关下载链接:...
编译mrobot时安装了相应的库,例如ecto等等。 make的时候,链接报错一大堆,最上面一行写着: /usr/bin/ld: cannot find -lmsc 用apt-cache search查询以后,下载了这个包解决: apt install ros-kinetic-lms1xx
这是一个ROS的launch文件,用于启动Gazebo仿真环境,并加载机器人模型。其中,包含了以下几个节点: 1. empty_world.launch:通过该节点运行Gazebo仿真环境。 2. joint_state_publisher:用于发布机器人的关节状态...
XACRO优化URDF
标签: ROS
在URDF文件下创建两个文件 一个mrobot.urdf.xacro 一个mrobot_body.urdf.xacro 其中mrobot.urdf.xacro内容如下 在这里插入代码片
这部分是针对launch文件的参数设置,具体解释如下: 1. world_name:仿真环境的世界文件路径。 2. paused:仿真环境是否暂停,默认为false。 3. use_sim_time:是否使用仿真时间,而不是系统时间,默认为true。...

由于nvidia TK1本身系统原因对于无论是购买性价比高的mrobot还是turtlebot都为测试以及使用造成了很多麻烦,经过几天的操作总结如下: 1.使用Jetpack安装系统 ... 2.对外接外接硬盘进行分区,分别挂载到 /home /usr...
arduino控制器程序可上网查询下载后导入即可 1.安装ROS和turtlebot http://blog.csdn.net/qq_35379989/article/details/78933451 ... 2.配置环境 gedit ~/.bashrc 在末尾添加一下语句...
ubuntu14下使用Kinect v1实现地图构建步骤为: 1.安装openni sudo apt-get install ros-indigo-openni-camera ros-indigo-openni-launch 安装libopenni-sensor-primesense-dev sudoapt-getinstalllibopenni-...
ROS入门七 机器人建模——URDFURDFufdf介绍语法创建机器人URDF模型创建机器人描述功能包创建URDF模型在rviz中显示模型 URDF ufdf介绍 用于描述机器人结构的格式。根据该格式的设计者所言,设计这一格式的目的在于...
1.导航功能包 (1)move_base:实现机器人导航中的最优路径规划 (2)amcl:实现二维地图中的机器人定位 命令安装 ...mkdir -p ~/catkin_ws/src/mrobot_navigation/config/fake 2.代价地图的配置 ...
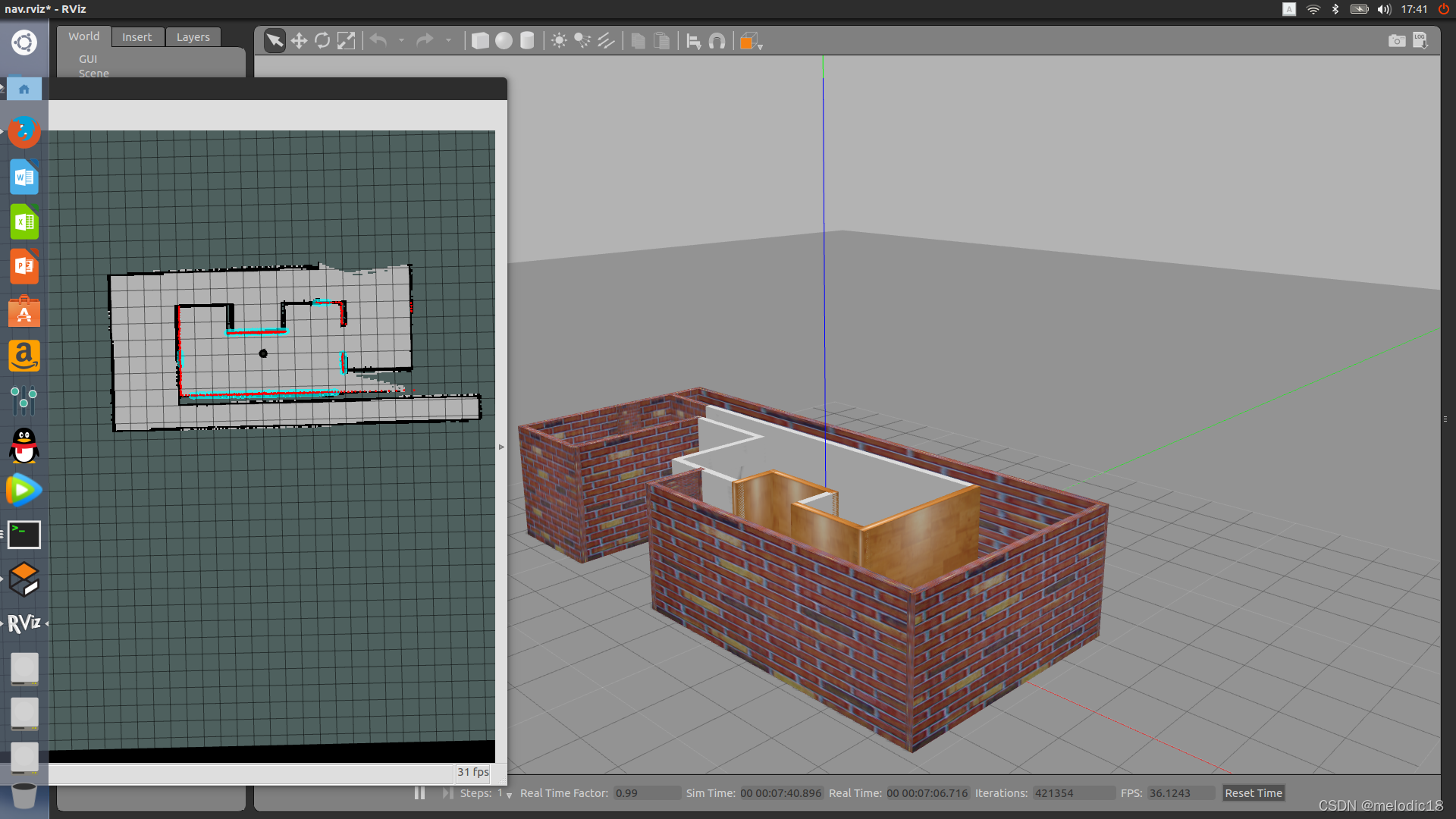
解决办法:登录 $git clone https://github.com/huchunxu/ros_exploring.git下载作者源码与之对比查找错误即可。成功运行图示:
无论turtlebot还是根据mrobot、rbx1使用 roslaunch turtlebot_follower follower.launch均可以实现,但是如果不对原launch文件修改运行该指令还是无法让小车动起来,下面为实现人体跟随包括解决此问题的具体步骤: ...
一、建立URDF模型 1. URDF Unified Robot Description Format 统一机器人描述格式 2. 标签 声明使用xml描述 <?xml version="1.0" ?> ...link用于描述一个刚体部件的外观和物理属性 ...用于描述几何形状
机器人操作系统 ROS 进阶使用 使用摄像头识别物体 跟随物体

ROS URDF添加传感器模型 添加传感器模型 添加摄像头 对应的模型文件是camera.xacro, 内容如下 <?xml version="1.0"?> <...xacro:macro name="usb_camera" params="prefix:=camera">...link name="${prefix}


《ROS机器人开发实践》前六章踩的坑
首先建立一个功能包mrobot_gazebo (gazebo_plugins gazebo_ros gazebo_ros_control roscpp rospy) $ cd ~/catkin_ws/src $ catkin_create_pkg mrobot_gazebo gazebo_plugins gazebo_ros gazebo_ros_control roscpp...
运行命令roslaunch mrobot_descriptiondisplay_mrobot.launch 出现如下错误 原因是名为“mrobot.urdf.xacro”的文件的宏调用出错,将其修改如下图即可。 保存后,在此运行指令 roslaunch mrobot_description...
推荐文章
- window.open和vue router新开页面_vue window.open-程序员宅基地
- Mysql 自增id、uuid与雪花id_mysql自己生成雪花算法id-程序员宅基地
- RTKLIB源码及介绍-程序员宅基地
- 时序预测 | MATLAB实现ARMA和ARIMA时间序列预测_matlab auto regressive moving average-程序员宅基地
- Windows消息拦截技术的应用(Hook钩子)_钩子拦截输出-程序员宅基地
- HTTP协议入门-程序员宅基地
- WPF 自定义柱状图 BarChart-程序员宅基地
- Python中异常捕捉try..except...finally的使用_try-except语句可以有多个finally子句a对b错-程序员宅基地
- <5>系统安全与权限_系统权限安全问题-程序员宅基地
- Linux下安装JDK_linux安装jdk1.7-程序员宅基地