
”MSCKF“ 的搜索结果
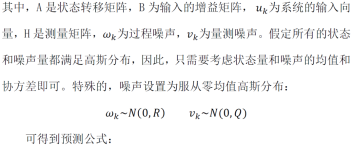
后续将进行MSCKF数学基础介绍,先总结一下数据符号定义 坐标系定义 物理量定义 估计量定义 四元数定义:四元数有Hamilton和JPL两种形式,不同论文定义不一致,后面统一使用的JPL形式,区别如下 2...

ROS学习笔记之——MSCKF
标签: linux
Demo MSCKF_MONO https://github.com/daniilidis-group/msckf_mono 运行此包时,注意要依赖:https://github.com/uzh-rpg/fast 这是一个FAST corner detector 运行节点 roslaunch msckf_mono euroc.launch ...
根据3.3的说法,也即是公式(14),相机的pose是IMU的pose而来。相机和IMU之间的外参是固定的,所以这两者知道一个就知道另一个了。 所谓的状态扩增就是增加一个相机的位姿,新增加的相机位姿啥都不知道?...
相关博客记录
点击上方“3D视觉工坊”,选择“星标”干货第一时间送达Sliding Windows Filter(SWF)在VIO、SLAM这个领域应用非常广,比如MSCKF、OKVIS、VINS-M...
MSCKF参数: + 状态向量里滑动窗口大小的范围、 + 空间点三角化误差阈值、 + 是否做零空间矩阵构造 和 QR分解 构造MSCKF状态向量 IMU数据,估计新的MSCKF状态变量和对应的协方差矩阵 图像数据处理 ...
msckf_mono学习笔记 在此记录一下学习过程 构建工程 按照msckf_mono的github工程上的介绍安装就好。 依赖项 ROS Kinetic(应该主要是为了用到rviz的可视化) OpenCV 直接用系统默认的,没有的话,运行如下命令: ...
VIO算法的核心在后端,不管是优化的方法还是滤波的方法,都是靠后端的紧耦合融合获得较高的VIO精度,为了节省计算量一般前端都会做得很简单,基本都是FAST、Harris等角点加LK光流跟踪(S-MSCKF中使用的FAST角点,...
MSCKF_vio是一种基于多状态约束卡尔曼滤波器的双目视觉里程计。其中多状态约束是指将多帧图像的相机位姿加入卡尔曼状态向量中,在进行卡尔曼增益之前通过多帧图像之间的约束进行最小二乘优化来估计特征点的空间...
sudo apt-get install libsuitesparse-dev cd ~/catkin_ws/src git clone KumarRobotics/msckf_vio cd .. catkin_make --pkg msckf_vio --cmake-args -DCMAKE_BUILD_TYPE=Release...roslaunch msckf_vio msckf_vio_e...
论文
####仅作为笔记 环境: ROS Kinetic Boost OpenCV Eigen fast 依赖 sudo apt-get install libopencv-dev #可以源码安装opencv sudo apt-get install libboost-dev #boost库 sudo apt-get install libeigen3 #eigen...


视觉惯性里程计MSCKF算法的实现和改进,用于移动平台(例如机器人)的位姿估计_MATLAB_源码_下载.zip
文章目录ReferenceEKF的状态变量构建坐标系的表示问题位姿表示方式IMU状态变量的表示方式带相机位姿的状态变量表示方式MSCKF位姿估计——估计的变量是什么?MSCKF位姿估计——状态变量的估计IMU姿态的传导...
MSCKF_VIO算法 1、MSCKF视觉惯性融合算法简介 惯性导航利用惯性测量单元(IMU)测量得到的角速度、加速度信息进行惯性导航解算得到运载体的位置、速度、姿态(含航向)等信息,具有实时性好、动态性能好等优点;但是由于...
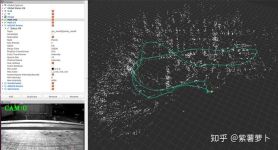
s-msckf主要由image_processor跟msckf_vio两个节点组成。 Image_processor中主要的算法位于ImageProcessor::stereoCallback()。 一、前端图像处理 image_processor::stereoCallback()接收双目图像数据,首先构建图像...
最近因为项目需求,对MSCKF_vio的论文和代码进行了一番研读,现将学习过程记下。 MSCKF_vio是一种基于多状态约束卡尔曼滤波器的双目视觉里程计。其中多状态约束是指将多帧图像的相机位姿加入卡尔曼...
MSCKF-VIO编译安装
标签: ubuntu
原始msckf不能输出运行轨迹,需作更改。
网上搜索了下,17年初的时候基本VIO算法就是MSCKF最完备。github上面有一个非官方的实现,就下下来研究。 但是跑kitti的数据都效果很差。debug的时候甚至还查出一些书写错误,比如x写成y。后面看issue,作者也说...
PDF版:https://github.com/cggos/msckf_vio_cg/blob/master/docs/msckf_note_cg.pdf (持续更新中) 本PDF对应的LaTeX源码也在该文件同目录的github上,欢迎共同更新和修正
MSCKF方法作为扩展卡尔曼滤波器的一个改进版本,广泛应用于视觉惯量导航系统里面,支持在中低端设备上面做实时的自我定位和跟踪。
笔记:https://ug98gs7tbw.feishu.cn/docs/doccnr5sB0Fvc27b1SZjoGPpEUc# 论文:https://arxiv.org/abs/1712.00036 代码:https://github.com/KumarRobotics/msckf_vio
MSCKF(多状态约束扩展卡尔曼滤波器) 介绍: 用于移动平台(例如机器人)的姿态估计的视觉惯性测距法的MSCKF算法的实现和改进。 阅读以下文章: 技术细节: 本文采用的当前方法缺乏重要的统计不一致之处。 报告中将...
推荐文章
- 联邦学习综述-程序员宅基地
- virtuoso--工艺库答疑_tsmc mac-程序员宅基地
- C++中的exit函数_c++ exit-程序员宅基地
- Java入门基础知识点总结(详细篇)_java基础知识重点总结-程序员宅基地
- 【SpringBoot】82、SpringBoot集成Quartz实现动态管理定时任务_springboot集成quratz 实现动态任务调度-程序员宅基地
- testNG常见测试方法_idea_java_testng 测试-程序员宅基地
- Debian11系统安装-程序员宅基地
- Centos7重置root用户密码_centos7更改root密码-程序员宅基地
- STM32常用协议之IIC协议详解_正点原子stm32 iic-程序员宅基地
- 【视频播放】Jplayer视频播放器的使用_jplayer 播放amr-程序员宅基地