
”MSCKF“ 的搜索结果
MSCKF 中文注释版
标签: MSCKF 滤波器
MSCKF 中文注释版,多状态约束下的Kalman滤波器,Multi-State Constraint Kalman Filter

在ubuntu20.04编译msckf-vio代码详细步骤。

MSCKF_VIO MSCKF_VIO软件包是MSCKF_VIO的立体声版本。 该软件接收同步的立体声图像和IMU消息,并生成IMU帧的实时6DOF姿态估计。 该软件已在带有ROS Kinetic的Ubuntu 16.04上进行了测试。 视频: : 论文草案: : ...
S-MSCKF 论文公式推导与代码解析高洪臣2019 年 9 月 1 日目录概述代码流程代码流程EKF 状态向量IMU 误差状态方程 .IMU 状态向量预测 .
MSCKF_VIO MSCKF_VIO软件包是MSCKF_VIO的立体声版本。 该软件接收同步的立体声图像和IMU消息,并生成IMU帧的实时6DOF姿态估计。 该软件已在带有ROS Kinetic的Ubuntu 16.04上进行了测试。 视频: : jxfJFgzmNSw&t ...
MSCKF vio SLAM融合算法matlab模型源码及完整测试集
msckf_vio.zip
标签: slam
双目MSCKF
崔华坤VINS、MSCKF/ROVIO论文推导和代码解读,有助于学习VIO。需要的马上行东起来!!!!!!!!!!!!! VINS VIO ROVIO
MSCKF公式推导,来自大佬的解读,分享给大家,希望有帮助!
主要数据结构:StateServer当前里程计状态 // imu状态、若干相机位姿、状态协方差矩阵、噪声协方差 struct StateServer { IMUState imu_state; CamStateServer cam_states; // State covariance matrix ...
matlab的egde源代码msckf-swf比较 我们的CRV 2015论文“滤波器至上之战:多状态约束卡尔曼滤波器和滑动窗口滤波器的比较研究”的MATLAB代码和数据。 该代码由Lee Clement和Valentin Peretroukhin编写。 您可以通过{...
s_msckf:采用多状态约束的双目vio系统 sudo apt-get install libsuitesparse-dev cd ~/catkin_ws/src git clone KumarRobotics/msckf_vio cd .. catkin_make --pkg msckf_vio --cmake-args -DCMAKE_BUILD_TYPE=...
MSCKF公式推导.pdf
标签: 文档资料
很好的公式推导资料,步骤详细,内容丰富

长凳_ws 用于对不同状态估计算法进行基准测试的 catkin 工作区,即: 建造 构建过程相当自动化,此 repo 假设您在安装了 Ubuntu 18.04 的 linux 机器上运行。 然后要使用此存储库,您将发出以下命令, ...
tonav:用于视觉辅助惯性导航的多状态约束卡尔曼滤波器(MSCKF)的实现。 这是我的硕士论文
讲这个文件直接解压就可以使用,省去需要手动添加random_numbers文件夹的烦恼。下载后放在catkin/下面就可以用catkin_make --pkg msckf_vio --cmake-args -DCMAKE_BUILD_TYPE=Release进行编译了
针对传统多状态约束卡尔曼滤波算法(MSCKF)在实现机器人室内定位时,速度和位置状态方程需要对IMU中加速度计的测量数据进行积分,存在漂移和累计误差,且加速度计受重力干扰问题,本文提出改进MSCKF算法.改进MSCKF...
MSCKF vio SLAM融合算法, 含matlab模型源码及完整测试集
该论文是MSCKF2.0的作者所写,提出如何对MSCKF进行改进,并改进了MSCKF算法的一致性,并提出了IMU误差的闭环形式的模型。
本文主要会对msckf与ekf的联系做一个大体的介绍,以便读者在掌握ekf思想的基础上更好地把握msckf的思路,不会涉及msckf内具体的数学推导,也不会像前几节一样对msckf的代码做具体展示,只在最后给出msckf的代码链接...
cd ~/msckf catkin_make --pkg msckf_vio --cmake-args -DCMAKE_BUILD_TYPE=Release 2、运行(运行euroc数据集) 首先roscore开启ros节点 cd ~/msckf source ~/msckf/devel/setup.bash roslaunch msckf_vio msckf_...
上图展示了整个msckf源码框架,每当收到新图像时,首先判断是否进行imu初始化,如果没有则进行imu的初始化,否则记录当前图像帧和上一图像帧之间的imu信息,然后利用记录的imu信息进行EKF滤波的imu预测过程,之后...
MSCKF系列论文阅读与代码流程
标签: slam
s-MSCKF kumar-双目MSCKF-开源 不支持在 Doc 外粘贴 block 源码地址:https://link.zhihu.com/?target=https%3A//github.com/KumarRobotics/msckf_vio 开源 S-MSCKF:
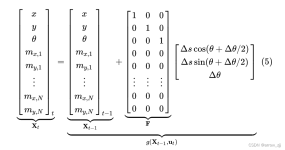
VIO系统在使用IMU测量值进行状态预测时,需要将连续时间的微分方程离散化为差分方程,离散化的本质是积分,根据数值积分近似程度不同,常用的有欧拉法、中点法和四阶龙格库塔法等,OpenVINS和MSCKF_VIO虽然都使用RK4...
推荐文章
- 企业数据管理数据备份与恢复_企业生产数据备份恢复方案-程序员宅基地
- 16. QML中的一些粒子特效_qml实现的特效-程序员宅基地
- Android开源项目及资源查速表_android tape queuefile-程序员宅基地
- 巨杉数据库 CTO 王涛:新一代分布式数据库-程序员宅基地
- 最全css居中:水平居中+垂直居中+水平/垂直居中总结_style 水平居中-程序员宅基地
- 【愚公系列】2024年02月 《网络安全应急管理与技术实践》 015-网络安全应急技术与实践(Web层-文件上传漏洞)-程序员宅基地
- 从数据仓库到大数据,数据平台这25年是怎样进化的?[转]-程序员宅基地
- 关于使用Java后台导入excel文件,读取数据后,更新数据库,并返回数据给到前端的相关问题总结_excel 导入时第一条导入后将第一条的数据返回-程序员宅基地
- 一例JAVA多线程访问卡死的现象_http-nio-8181-exec-4 线程过多导致卡死-程序员宅基地
- Linux调试器之gdb-程序员宅基地