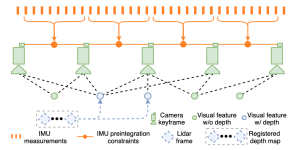
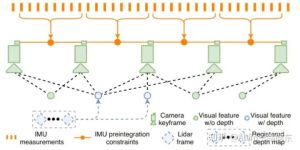
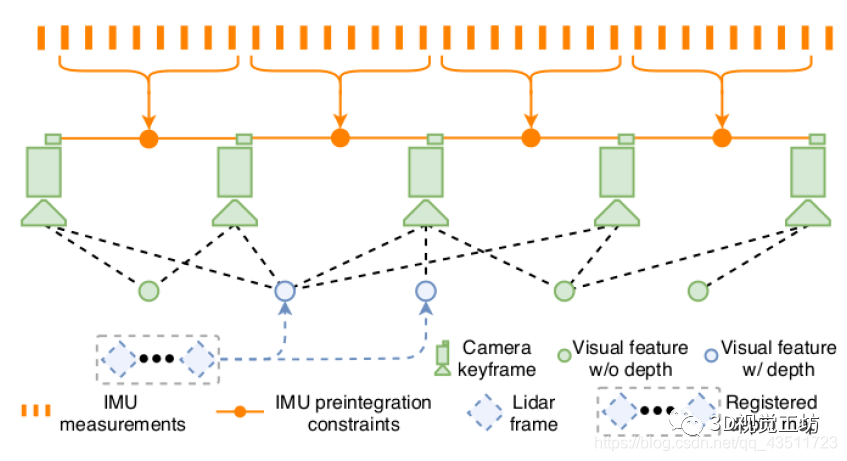
该框架由两个关键子系统组成:视觉-惯性系统(VIS)和激光雷达-惯性系统(LIS)。视觉惯性系统处理图像和 IMU 测量值,激光雷达测量值为可选项。视觉里程测量是通过最小化视觉和 IMU 测量的联合残差获得。...
”LVI-SAM“ 的搜索结果

LVI-SAM论文!!!!!!!!!


Ubuntu18.04安装ROS-melodic保姆级教程_灬杨三岁灬的博客-程序员宅基地还是那句话,有时候加了这行也不好使,我是疯狂试了20+次,最后打了一局游戏,回来就过了,这就得看网络看命了,不行就在网上搜搜终极大招(动手...
视觉,IMU,激光雷达融合
编译环境:ubuntu20.04+ros noetic + opencv 4.2.0 + gtsam4.0.3 + Ceres2.0.0(一定要注意版本信息,我复现的时候更换了三次的gtsam的版本,ceres-solver的版本也是进行了更换)解决办法:cmake/HandleEigen.cmake ...
LVI-SAM:实时视觉惯性SLAM的革新之作 项目地址:https://gitcode.com/TixiaoShan/LVI-SAM LVI-SAM 是一个开源项目,由Tixiao Shan和Xin Tong等人开发,旨在提供一种高效、准确且实时的视觉惯性同步定位与建图...


原因:运行结束,对roslaunch执行ctrl+c后,进程会执行rosspin()后面的程序,在一定时间内程序没有执行完毕,进程会强制退出,并抛出escalating to SIGTERM错误。解决方法:将./config/KITTI_camera.yaml中图像尺寸...

视觉-激光融合SLAM :LVI - SAM与LIO - SAM的环境配置
源码链接:https://github.com/TixiaoShan/LVI-SAM.git。原因:vtk是在pcl安装过程中随着pcl库安装时安装。注:直接catkin_make会死机。解决方法:重装pcl。
LVI-SAM安装与测试
标签: 自动驾驶




KITTI官网下载:真值:Download odometry ground truth poses (4 MB)标定参数(以及时间戳):Download odometry data set (calibration files, 1 MB)真值标定参数raw data下载参考链接地址。

LVI-SAM论文翻译
标签: 自动驾驶




但是我按照这种方法还是解决不了啊!当时还觉得opencv库目录不对,想转移,但是本身就有的.so.文件分布地又很乱,所以有尝试自己重新安装一个新的opencv4,但是,中途又出现了各种小问题,总之是该卸载地没卸载干净,...
推荐文章
- Codeforces-学校排队-程序员宅基地
- 计算机毕业设计ssm基于JAVA的图书馆自习室座位预约系统194fd9 (附源码)轻松不求人_基于ssm的图书馆预约座位-程序员宅基地
- 实值复变函数求导 ——(Wirtinger derivatives)_wirtinger导数-程序员宅基地
- VMWare虚拟机设置固定IP上网方法_vm虚拟机只允许指定ip访问-程序员宅基地
- 深度学习修炼(一)线性分类器 | 权值理解、支撑向量机损失、梯度下降算法通俗理解-程序员宅基地
- 基于SpringBoot的社区团购APP+02043(免费领源码)可做计算机毕业设计JAVA、PHP、爬虫、APP、小程序、C#、C++、python、数据可视化、大数据、全套文案-程序员宅基地
- 如何在无公网IP环境下远程访问Serv-U FTP服务器共享文件-程序员宅基地
- uniapp的navigateTo页面跳转参数传递问题_uni.navigateto刷新携带参数丢失-程序员宅基地
- C++中std::getline()函数的用法-程序员宅基地
- vue 工作中的一些小总结(基础知识供刚入门的小伙伴看 vue+elementUi+vsCode+vue-router+iconfont )_mac+elementui+vscode-程序员宅基地